한전의 네트워크 같은 전력 공급자의 선로에서는 외부 이물질로 인해서 순간적인 단락이나 전압 강하 등이 쉽게 발생할 수 있습니다. 나뭇가지로 인해서 순간 단락이 되었다면 나뭇가지는 불에 타서 순간에 없어지지만 그 후단의 전체 계통에 순간적인 전압강하가 발생할 수밖에 없는데 이로 인해서 공장이 다운된다면 너무 손해가 클 수밖에 없습니다. 그래서 이런 경우에 차단기를 트립시키지 않고 전동기가 순간 감속되다가 다시 정상 속도로 회복되도록 돕는 것이 당연할 것입니다. 이와 같은 경우에 대처하기 위해서 재가속과 재기동이란 시스템이 필요합니다.
개요
재가속 (Reacceleration)은 시스템 전압 이벤트(순간전압강하, 정전, BUS 전환 등)로 인해 발생하는 예기치 않은 전동기의 속도 저하 후 전동기를 자동으로 재가속하는 개념입니다. 재가속 플랜은 전원 상실의 신속한 감지와 복전 그리고 허용 가능한 전동기의 과도 토크 한계의 감시 및 전동기 전자접촉기의 자동 재폐로를 통해 공정 중단을 최소화하기 위해 설계됩니다.
재가속 (Reacceleration)은 연결된 부하와 최소 단락 전류에 따라 단번에 이루어질 수도 있고 혹은 공정 재기동 중 BUS 전압이 허용 수준에서 유지되도록 단계적으로 이루어질 수도 있습니다. 재가속 과정의 설계가 부적절할 경우 BUS 전압이 허용 가능 수준 이하로 떨어지면 추가적인 시스템 정전이 발생할 수 있습니다.
생산량을 유지하고 안전밸브의 동작을 방지하고 장비 손상을 피하기 위해 부하를 우선순위에 따라 나누는 특별한 고려가 필요합니다. 여러 공정은 각 공정의 특성에 따라 일시적인 정전에 견딜 수 있는 능력이 수 ms에서 수 초까지 차이가 날 수 있습니다.
재가속 (Reacceleration) 시스템 구성을 위한 최소한의 요구 조건은 수 ms 범위 내의 단시간 정전과 전동기 기동 회로의 전기적 유지 기능입니다. 즉 복전이 되면 자동으로 전동기가 재기동되도록 하기 위해서 기동 회로를 CLOSED 된 상태로 유지시키는 기기가 있어야 합니다.
1. 서론
1) 전동기 재가속과 시스템의 이점
현대의 석유화학 시설은 공정 운전을 위해 전동기를 주로 사용하는 방식으로 설계되어 있습니다. 재가속은 심한 전압 강하로부터 회복을 돕기 위해 모든 종류의 변전소 설계에 적용할 수 있습니다. 석유 화학 공장에서 고압 및 저전압 시스템에는 일반적으로 2차 선택 시스템 (secondary selective system)의 배전 방식을 적용하고 있습니다. 2차 선택 시스템은 기본 소스(BUS A)가 손실될 경우 전동기 부하 BUS를 대체 소스(BUS B)로 전환시킵니다. 전원 전환은 전동기 BUS의 잔류 전압이 안전한 수준으로 감소한 이후에 수행됩니다.
허용 가능한 잔류 전압과 그로 인한 최악의 과도 토크는 "IEEE Guide for AC Motor Protection [6]"에서 기준을 제시하고 있습니다. 잔류 전압이 초기 수준의 20%-25%까지 감소하면, 타이 브레이커를 이용하여 부하 버스를 다시 가압시킵니다. 과거에는 저전압 또는 무전압 상태 후 지속적인 공정 운전을 보장하기 위해 이전에 온라인 상태였던 모터를 그룹으로 나누어 자동으로 재기동시키는 방식을 채용하였습니다.
전기적 고장이나 정전으로 인해 BUS 전환이 필요할 때, 공정 연속성을 유지하기 위해 재가속 시스템이 적용될 수 있습니다. 이때 단위 공장의 시정수는 공정 제어가 유지되는 동안에 모터의 재가속이 발생할 수 있을 정도로 충분해야 합니다.
2) 전동기 재가속과 관련된 문제
현대적인 계전 시스템은 고속으로 타이 브레이커를 동기 상태에서 투입시킬 수 있습니다. 예비 전원이 잔류 전압과 동기화되어 타이 브레이커가 충분히 빠르게 성공적으로 투입되면, 전동기의 전자접촉기와 차단기가 OPEN 되지 않을 수 있고, 전동기가 재가속될 필요가 없이 공정 운전이 지속될 수도 있습니다. 그러나 전압이 매우 낮은 수준까지 빠르게 붕괴되면, 고속 버스 전환 시스템 (HIGH SPEED TRANSFER SYSTEM)이 동작되지 않고 따라서 BUS가 전환되지 않을 수 있습니다. 이러한 경우에 버스 전환은 잔류전압 전환 방식을 따르게 됩니다. 시스템의 전압 상실 또는 외란 후 전압이 복원될 때 사전에 프로그램된 그룹별 모터를 재가속하여 공정 무결성을 유지할 수 있는 능력이 시스템의 과도 성능을 측정하는 방법 중의 한 가지입니다.
전압 상실 또는 외란 중에 운전 중인 유도 전동기는 저전압 조건으로 인해 토크 출력이 감소하게 됩니다. 구동 장비에서 요구하는 토크는 전동기 슬립의 증가와 운전 속도의 감소를 유발하는 감속 효과를 발생시킵니다. 전동기 단자에 정상 전압이 복원되면, 전동기 토크는 부하 토크 요구 사항을 충족시키면서 동시에 전동기가 정상 운전 속도에 도달할 때까지의 가속 토크를 제공할 수 있는 충분한 여유를 가지고 있어야 합니다. 복원된 전압이 필요한 토크를 제공하지 못하면, 전동기는 가속하지 못하고, 한 속도에 머무르거나 전동기의 보호 장치에 의해 차단될 때까지 계속 속도가 느려집니다. 정격 속도의 약 90% 이하에서 일반적인 전동기에는 기동 전류의 대부분이 흐르게 됩니다. 2차 선택적 변전소 (Secondary selective system)의 자동 전환 중에, BUS 전환 작업에 의해 고립된 부하 버스에 전압이 복원된 후, 전환 전에 운전 중이던 모든 중요 전동기는 공정 연속성을 유지하기 위해 재가속해야 합니다. 또한, 재가속으로 인한 전압 강하가 복원 버스로부터 공급되는 운전 중인 전동기에 지장을 초래하지 않아야 합니다.
전동기 기동의 동적 컴퓨터 모델링은 전동기 기동과 재가속을 위한 전력 시스템의 능력을 결정하는 데 사용할 수 있습니다. 최소 발전기 운전 용량의 약 25% 이상의 용량을 가진 전동기가 있는 경우에는 설계 초기에 전동기 기동의 동적 모델 시뮬레이션을 수행해야 합니다. 시뮬레이션은 최소 단락 전류 구성으로 시스템이 전동기를 기동하고 최악의 부하 조건에서 전동기를 재가속할 수 있는지에 대해 적정성을 검사해야 합니다. 프로젝트 초기 단계에서는 대부분의 저압 전동기에 대한 확정적인 데이터가 없기 때문에, 그룹별 재가속에서 집합 부하의 단순화된 시스템 설정을 사용하여 재가속 단계를 설계할 수 있습니다.
3) 성공적인 전동기 재가속을 위한 기준
성공적인 재가속을 위해 일반적으로 사용되는 설계 기준은 전동기 버스의 초기 전압을 버스 정격 전압의 약 80%로 유지하는 것을 목표로 합니다. 이렇게 하면 전동기 단자의 전압이 적어도 전동기 명판 전압의 75% 이상이 되도록 보장할 수 있습니다. 75% 전압은 펌프와 같은 정상 관성 부하를 재가속하는 데 충분하며, 전동기는 적어도 100% 기동토크 와 200% 최대 토크를 가지게 됩니다. 팬, 압축기 또는 더 높은 단자 전압을 요구하는 전동기와 같은 고관성 부하는 설계 중에 특별한 주의가 필요합니다.
2. 잔류 전압이란 무엇이며 왜 전동기 기동에 대해 걱정해야 할까요?
NEMA MG1 섹션 1은 BUS 전환 또는 재폐로와 같은 비정상적인 상태에서의 전동기에 대해 정의하고 있습니다. 이 표준은 전원의 차단과 재폐로 사이의 시간이 기계의 개방 회로 시정수의 1.5배인 경우를 느린 전환 (Slow Transfer)으로 정의하고 있습니다. 전동기에 새 전원을 인가하기 전에 개방 회로 시정수의 1.5배까지 기다림으로써 전동기와 구동 장비의 손상을 최소화할 수 있습니다. 그림 1 참조.
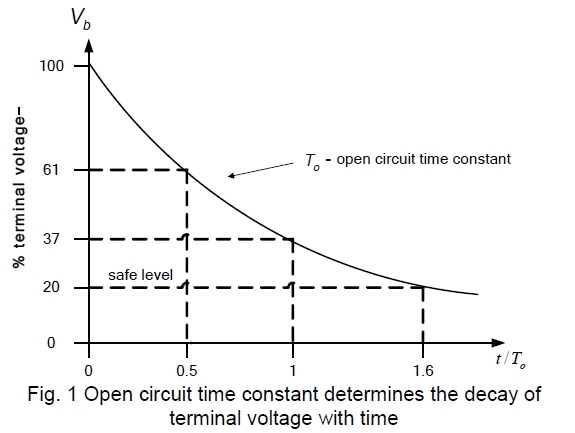
그림1 - 개방회로 시정수가 시간에 따른 단자전압의 감쇠를 결정함
빠른 전환 (fast transfer)이나 개방 회로 시정수 구간보다 짧은 기간 내에 재폐로를 할 경우에는, 전동기 잔류 전압과 주파수가 새롭게 연결된 BUS로부터의 전압과 주파수와 차이가 작아서, 기계 손상을 일으키는 과도 토크를 발생시키지 않을 때 동기화를 거쳐 차단기의 재폐로가 되어져야 합니다.
전원 공급원으로부터 분리된 BUS에서, 회전하는 전동기 부하의 관성과 자기장에 갇힌 에너지는 전동기 단자에 잔류 전압을 발생시킵니다. 전동기의 전자접촉기가 떨어지지 않았다면, 이 전압은 BUS의 잔류 전압에 영향을 미칩니다. 그리고 이 전압은 분리된 전동기 BUS에 연결된 다른 부하에 계속 작용할 것입니다. 전동기의 잔류 전압과 주파수의 크기는 회전하는 전동기 그룹이 감속됨에 따라 감소하게 됩니다. 그러나 전동기의 RPM 감소는 부하와 분리된 전동기의 관성 감속과 같지 않습니다. 주파수 감소는 정상 손실의 함수이고, 샤프트 속도는 부하, 마찰력, 권선 및 다른 부하로부터의 전압의 회생 제동 효과 등의 복잡한 함수입니다. 잔류 전압의 크기는 회전자 자속의 지수적 감소와 함께 떨어지며, 부하 관성의 함수입니다. 그림 2는 6,000 HP 유도 흡기 팬의 개방 회로 감쇠의 예를 보여줍니다.

그림 2 - 고관성 부하 대형 전동기의 위상각과 잔류 전압 감쇠
시스템이 전원 공급원으로부터 분리되면, 다양한 전동기는 각각 다른 시정수를 가집니다. 개별 전자접촉기와 회로 차단기가 OPEN되어 전동기를 분리할 때까지, 짧은 시정수와 빠른 샤프트 속도 감소를 가진 것들은 역전력으로 구동되는 "전동기"로 계속 작동하며, 긴 시정수와 높은 관성 또는 가벼운 부하를 가진 것들은 유도 발전기로 작동하게 됩니다. 감쇠하는 동안 하나의 BUS 전압과 하나의 BUS 주파수가 있게 됩니다. 이 잔류 전압은 단락 계산에 사용되는 "유도 전동기 기여 전류"의 근원이 됩니다.
1) 잔류 전압의 특성
대체 소스로부터 전압을 재인가 하기 전에 얼마의 시간 지연이 필요한지를 분석하는 데 사용되는 개방 회로 시정수는 전동기 모델에 의해 결정됩니다. 개방 회로 시정수의 정의는 전동기가 소스로부터 분리된 후 전동기의 단자 전압이 초기 값의 36.8%로 감소하는 데 걸리는 시간(초)입니다. 이 값은 전동기 유도 저항을 회전자 저항으로 나누어 구합니다. 아래 그림 3에서 보여지는 등가 전동기 모델은 정격 속도에서 Ω/phase 단위의 전동기 저항과 리액턴스를 보여줍니다. 회로는 단상으로 표시되며, 균형 잡힌 전압 분석에 유효합니다.
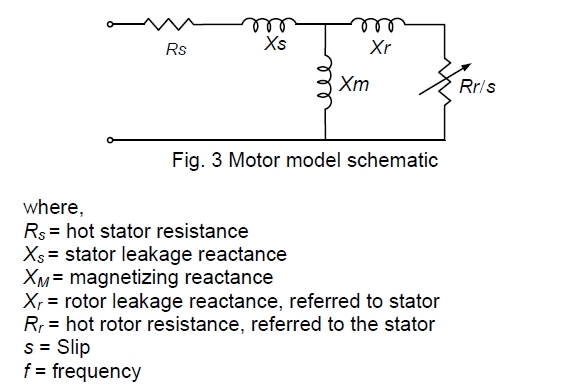
이 모델은 전동기의 설계에 의해 정의됩니다. 주어진 시점에서의 전동기의 시정수는 다음의 수식에 의해 주어집니다.
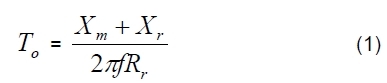
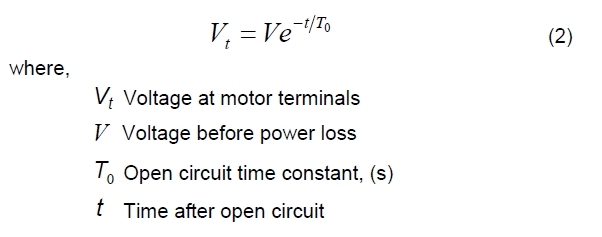
고정된 시점에서 자화 리액턴스는 회전자 누설 리액턴스보다 전동기 자속 밀도에 더 큰 영향을 미치므로 개방 회로 시정수에 영향을 주게 됩니다. 따라서 모델은 자화 리액턴스 항과 회전자 리액턴스만 사용하여 단순화할 수 있게 됩니다. 위에서 언급했듯이, 공급 전압이 전동기에서 차단될 때, 전동기의 단자 전압이 즉시 0으로 떨어지지는 않습니다. 전동기가 시스템 전압으로부터 분리된 후에도 자속이 내부에 갇혀 있고, 전동기 개방 회로 단자에 전압이 계속 나타나게 됩니다. 분리된 시간 t 초 후에 전동기의 순시 단자 전압이 얼마인지를 알아내려면, 그림 1에서 볼 수 있듯이 개방 회로 시정수가 사용되며, 식(2)와 같이 구해집니다.
2) 잔류 버스 전압과 과도 토크
2차 선택 시스템 (secondary selective system)에서는 인입 주 차단기가 개방된 후 전원에서 분리된 BUS의 전압 감소는 연결된 전동기의 개방 회로 시정수와 분리된 시스템의 임피던스에 의해 결정됩니다. 전동기 내부 전압의 크기가 감소함에 따라 주파수도 변하게 됩니다. 방정식 (3)은 유도 전동기 전압과 토크와의 관계를 나타내며, Δ% 토크 = (Δ% 전압) 제곱의 근사치를 제공합니다.

예를 들어 전원 차단기가 개방되고 타이 브레이커가 동기화되어 투입될 때 전동기 내부 전압이 정격 BUS 전압의 30% 라면 Δ% 전압은 70%가 됩니다. 70%를 제곱하면 49%의 기동 토크가 나옵니다. 잔류 전압 크기가 30%이고 타이 브레이커의 가압된 쪽의 시스템 전압과 180도의 위상 차가 발생한 경우, 결과적인 전압은 130% V이고 재가속 토크는 정상 기동 토크의 170%(130% 제곱)가 됩니다. 만약 잔류 전압이 50%이고 타이 브레이커의 가압된 쪽의 시스템 전압과 180도 위상차가 발생한 경우에는, 결과적인 전압은 150%가 되고 재가속 토크는 정격 기동 토크의 225%가 됩니다. 이는 전동기 개방 회로 시정수를 검토해야 할 이유와 잔류 저전압 계전기가 필요한 이유를 보여줍니다.
3. 전자접촉기 (Contactor)와 차단기(Breaker)가 BUS 저전압에 의해 받는 영향은?
오늘날의 석유화학 프로젝트는 다양한 형태의 스위치 장치를 통해서 전원을 공급받는 전동기로 구성되어 있습니다. 이러한 스위치 장치들은 전압이 떨어지거나 정전이 발생할 때 각각 매우 다르게 작동합니다. 수동 저전압(LV) 전자 접촉기를 가진 전동기 스타터는 BUS 전압에 연결된 스타터 제어 전원 변압기(CPT) 2차 전압이 마그네트의 여자 상실 전압 이하로 떨어지는 지점까지 감소하면 OPEN 됩니다. 일반적으로 이 숫자는 정격 제어 전압의 60%에서 70% 범위입니다. 또한 제조업체의 스타터 설계와 제어 회로의 잔류 정전용량과 저항의 함수에 따라 일부 시간 지연이 있을 수 있습니다. 스마트 스타터의 경우, 이 드롭아웃 (Drop-out) 전압과 시간 지연은 스타터 패키지의 기능에 따라 프로그래밍이 가능할 수도 있습니다. 타이 브레이커가 닫혀서 모든 개별 CPT를 다시 가압한 후 BUS 전압이 95%로 올라가면, 대부분의 스마트 스타터는 정전 후 재기동시 필요한 Power-up check를 자동으로 수행합니다.
일반적으로 석유화학 산업에서 MV 전동기에 사용되는 MV 전자 접촉기의 드롭아웃 전압은 코일 전압의 60%에서 68%의 정격 값을 가지고 있습니다. 코일 전압 드롭아웃을 이해하는 것이 중요합니다. 위에서 논의했듯이, 드롭아웃 전압은 전동기 BUS의 개방 회로 시정수에 의해 생성된 잔류 전압의 함수가 됩니다. 많은 경우에 이러한 전자접촉기에는 전압 강하를 견딜 수 있는 시간 지연 저전압(TDUV) 트립 장치가 내장되어 있습니다. 이러한 저전압 트립 장치는 일정 시간 동안 일정 수준의 전원 전압을 견딜 수 있도록 프로그래밍할 수 있습니다. 일반적으로 이러한 장치는 BUS 전압이 500 ms 동안 80% 이하로 떨어지면 드롭아웃하도록 설정하는 것이 권장됩니다.
또한 전자접촉기에는 제어 기능에 대한 250 ms 정도의 정상 드롭아웃 시간이 있습니다. 정상 드롭아웃 지연도 더 고급 전자접촉기에서는 조정 가능할 수 있습니다. 특정 제조업체의 TDUV가 어떻게 설계되었는지 이해하는 것이 중요합니다. 어떤 경우에는 전자접촉기가 드롭아웃하기 전에 TDUV의 시간 동안 트립 신호나 OPEN 명령이 존재하여 부하를 차단하는 결과가 나올 수 있습니다. 이 시간 지연은 2초까지 조정 가능하기 때문에 아크 플래시 위험과 장비 손상이 심각하게 발생할 수 있습니다.
대형 전동기에는 종종 차단기 (Circuit Breaker)가 설치됩니다. 이는 2,500 HP 이상의 모든 전동기에 해당할 수 있습니다. 대부분의 기업은 차동 전류계전기 (Differential Relay)를 전동기에 적용하는 기준을 가지고 있습니다. MV 전자접촉기의 정격 전류가 작기 때문에 이 크기의 전동기는 차단기 (Circuit Breaker)로 보호되어야 합니다.
대부분의 석유화학에 설치되는 시스템은 제어 전원으로 DC 전원을 사용하고 저압계전기를 통해서 차단기가 OPEN 되도록 합니다. 그럼에도 불구하고 일부 시설은 여전히 AC 제어 전원을 사용하여 OPEN과 CLOSE를 합니다. AC 전원은 시스템의 어디에서나 공급될 수 있지만, 일반적으로 인입부에 CPT(제어 전원 변압기) 가 있어 배전반에 전원을 공급합니다. 이러한 경우에는 차단기가 캐패시터 트립 장치를 통해 제어 전압 손실 시 트리핑 전원을 공급하는 방식을 사용합니다. 일반적으로 차단기는 AC 전원 상실 후 1초 이내에 트립 되어야 하며, 이는 캐패시터 트립 장치에 충분한 충전이 있어 회로 차단기를 OPEN 시킬 수 있도록 보장합니다.
몇 가지 MV 장치의 경우에는 전동기에 전력을 공급하기 위해 래치형 전자접촉기가 사용됩니다. 래치형은 차단기와 유사하게 작동합니다. 래치형 전자접촉기는 일반 전동기 스타터와 같이 드롭아웃되지 않습니다. 대신 트리핑 코일을 여자하여 트립 해야 합니다. 일반적으로 래치형 전자접촉기는 온보드 CPT에서 전원을 공급받으며, AC 트리핑 회로가 있는 차단기와 같은 방식으로 처리해야 합니다.
각각의 드라이브 (Drive - inverter or soft starter, etc)가 전압이 복원된 후 어떻게 동작할지에 대해서 와 각 드라이브 제조업체가 Start를 허용하면서도 드라이브를 보호하는 각각의 다른 방식에 대해 특별한 주의를 기울여야 합니다. 이러한 전동기 제어 장치들은 각각 별도로 선택된 제조업체에 따라 함께 평가되어야 하며, 고장이 해소되는 동안 발생하는 저전압으로 인해 전동기가 떨어지지 않기 위해 필요한 프로그래밍에 대해 확인해야 합니다. 재가속 방식의 성공에 있어 중요한 것은 잔류 전압이 0 V까지 가지 않고 25%까지 감소되는 것의 영향과 이 조건에서 재가속할 수 있는 하드웨어의 능력에 대하여 장비 제조업체와 논의하는 것입니다.
4. 재가속의 방법
이번 포스팅에서 참조했던 자료에서 이 부분을 번역해서 올리려고 하다가 포기했습니다. 그 내용이 제가 보기에는 맞지 않는 부분이 많고 실제 설계 경험에 비춰서 크게 도움이 되지 않는다고 판단했습니다. 아래의 내용은 참조 문서와 상관없이 저의 경험을 바탕으로 쓴 것임을 참조하셔서 이해하시면 좋겠습니다.
1) Reacceleration 과 Restarting (재가속과 재기동)
보통 발주처의 Specification에서 요구하는 것이 두 가지가 있습니다. Reacceleration과 Restarting입니다. 앞서 참조한 문서에서는 이 두 가지를 구분하지 않고 모두 Reacceleration이라고 표현했습니다. 중동 지역의 대부분 발주처 Sepcificaiton에는 아래와 같이 구분하고 있습니다.
Reacceleration (재가속) - 일반적으로 200ms 이내 (500ms까지 가능합니다.)의 정전이나 급격한 전압강하가 발생한 경우 주요한 전동기들은 DC 제어 회로의 경우에는 차단기나 접촉기가 트립되지 않고 연결된 상태로 유지되며 저압 전동기의 경우 전자접촉기가 OPEN 되어도 제어회로는 CLOSE 된 상태로 유지되어서 전원이 복구되거나 전압이 회복되면 별도의 조치 없이 바로 재가속을 하게 되는 것.
Restarting (재기동) - 정전이 200ms (혹은 500ms)를 초과하여 3초 이내에 복전되면 전동기들은 200ms 가 지난 시점에서 차단기나 전자접촉기가 트립 되어 정지되는 상태에 들어갑니다. 그러나 일부 대형 전동기나 관성이 큰 기기의 경우 전압이 완전히 0가 되지 않기 때문에 앞선 포스팅에서 설명한 바와 같이 Residual Voltage (잔류전압)이 정격의 25% 이하로 떨어진 것을 확인한 후 미리 프로그램된 그룹별로 전동기를 재기동하게 됩니다. 이 재기동은 DCS가 아닌 IPCS (SCADA)에서 수행하게 됩니다. 이 IPCS에 Restarting을 위한 프로그램이 있고 이 프로그램에서 그룹을 정해두면 그 프로그램에 따라서 재기동이 순차적으로 이뤄지게 됩니다.
2) Reacceleration (재가속)의 실제
전력회사의 전원이 순간 정전 후 바로 복전되는 경우나 전압 SAG 이후 바로 복귀되는 경우에는
Reacceleration 이 실제로 가능합니다. 이미 고압이나 저압 Main ACB 등은 일반적으로 DC 제어전원을 사용하기 때문에 제어전원 상실로 트립 되지 않으며 27 계전기의 세팅도 200ms를 초과하여 트립 되도록 세팅하기 때문에 200ms 이내에 트립 되지 않으므로 잠시 전동기의 속도가 감쇄되다가 재가속이 일어나서 공정에 큰 문제없이 복구가 가능합니다. 저압의 경우에는 AC 제어전원을 사용하기 때문에 MC 동작회로를 Close 상태로 유지시킵니다. 이를 위해 Capacitive Trip Device (CTD) 같은 임시 전원 공급장치를 사용합니다. 한전의 154kV 고속 재폐로 시간이 10-12 사이클로 알려져 있는데 이는 200ms 이내가 됩니다. 이 재폐로시 동기 검출 방식을 적용하면 위상차가 많지 않기 때문에 위상이 달라서 발생하는 과전압에 대한 문제가 해결됩니다.
그러나 플랜트 내부에서 정전이나 고장에 의한 문제가 발생했을 경우에는 2차 전환 시스템 (Secondary Selective System) 계통에서 Tie Breaker를 투입해야 하는 문제가 있습니다. 이 경우 고속 절환 시스템 (High speed Transfer)을 적용하면 200ms 이내에 전원을 투입할 수 있지만 실제로 고속 절환 시스템을 채택하는 경우가 많지 않습니다. 즉 대부분의 경우 200ms 가 지나서 전원이 투입되기 때문에 실제로 Reacceleration (재가속)이 발생하지 않게 되는 것입니다. 이 고속 절환을 하기 위해서는 정전이 발생한 즉시 이 정전이 내부적인 문제인지 외부 즉 전력회사 문제인지 따지지 않고 (따질 시간이 없음) 바로 절환을 해야 하는 문제가 있습니다.
플랜트를 운전하는 분들은 플랜트가 매우 위험한 공장이기 때문에 매우 보수적으로 접근합니다. 위험이 예상된다면 절대로 하지 않으려는 경향이 높습니다. 그래서 정말 정전이 되면 안 되는 그런 시스템이 있으면 모르지만 일반적으로는 고속 절환 시스템 (High speed transfer system)을 채용하지 않는 것 같습니다.
3) Restarting (재기동)의 실재
재기동은 더 어렵습니다. 프로세스를 운전하는 누구도 자기도 모르게 전기에서 일방적으로 기기를 돌려서 운전하게 되는 상태를 수용하지 않을 겁니다. 제가 했던 프로젝트들에서 Reacceleration, Restarting 요구가 있어서 전기적으로 시스템을 구축은 하였지만 한 번도 시운전 중에 이것을 시험한 적이 없습니다. 복잡한 공정에서 밸브와 압력과 기타 여러 조건들을 무시하고 DCS도 아닌 전기 시스템에서 전동기를 그룹별로 묶어서 순서대로 기동 시켜서 운전되도록 한다는 것은 생각하기 어렵습니다 그런데도 이런 Restarting 개념은 Specification에 남아있어서 계약적으로 설계를 하지 않을 수 없게 만듭니다.
200ms 가 지나면 모든 전동기는 정지하고 차단기나 전자 접촉기는 OPEN 됩니다. 이렇게 전원이 차단되어도 전동기는 완전 정지까지 계속 회전하고 이때 전동기가 발전기 모드가 되어 전압을 발생시킵니다. 따라서 이 전동기에서 발생하는 Residual Voltage가 BUS 전압의 25% 이하가 된 것을 확인한 후에 Restarting 이 시작될 수 있습니다. 200ms 가 지난 후 전력회사의 전원이나 Secondary Selective System에서 다른 건전 BUS의 전원이든 새롭게 전원이 복구되면 사전에 프로그램된 그룹 별로 전동기가 기동을 하게 됩니다. 이 그룹은 공정에서 정해서 주게 됩니다. 전기에서 어떤 전동기를 먼저 돌려야 할지 판단할 수 없기 때문입니다. 전기는 공정에서 받은 순서에서 그룹을 지정합니다. 이 그룹은 전동기 기동 시에 BUS의 전압이 허용 전압 아래로 내려가지 않도록 만들어야 합니다 Restarting Study가 바로 전압 강하가 기준 이하로 떨어지지 않도록 하기 위한 Study입니다.
4) 실무적인 접근
제가 수행했던 중동의 프로젝트에서는 언제나 Reacceleration과 Restarting에 대한 요구가 Sepec에 상세히 설명되어 있었습니다. 그렇지만 실제로 그 시스템을 시험해 본 경우는 없었습니다. 발주처의 공정 엔지니어는 절대로 그 위험한 시험을 허용하지 않았습니다.
따라서 전기적으로 Spec에 있는 요구 사항에 따라서 시스템을 설계하고 적용하고 Study를 하여 Report를 제출하는 것은 필요합니다. 그 시스템을 사용할지 여부를 결정하는 것은 공장 운전자입니다. 공정 엔지니어조차도 정확히 자동 기동을 통해서 공장이 정상화될 수 있는지 여부를 모릅니다. 그 정도로 정밀한 시뮬레이션이 가능하지도 않습니다. 그래서 이 Restarting 개념은 이해하고 적용하는 것으로 끝을 내면 됩니다.
본 포스팅은 아래의 자료를 참조하여 BING 번역을 일부 수정하여 작성되었습니다. 내용상 불필요한 부분은 삭제되고 도 일부 다른 자료를 추가하였습니다.
RearchGate - Motor Reacceleration to Improve Process Uptime
Article · September 2011 DOI: 10.1109/PCICon.2011.6085859
실제로 어느 프로젝트에서 이 재가속과 재기동에 대한 Dynamic Simulation을 요구했었습니다. 앞선 포스팅에서도 자세히 설명했지만 200ms 이후에 재가속이 가능한 부하는 몇 개 되지 않습니다. 저압 전동기는 거의 즉시 정지 상태로 돌아갑니다. 각 주요 전동기가 완전히 정지하기 전에 재가속이 가능한지를 시뮬레이션을 통해서 알아볼 수 있습니다. 그런데 실제로 그 프로젝트도 고속 절환 시스템이 설치되지 않아서 내부적으로 그 시간 안에 전원을 공급할 방법은 없었습니다. 이와 같이 이상적인 방법은 있지만 실제 현장에서 적용하는 데는 많은 어려움이 있는 것이 사실입니다. 따라서 실제 시스템적인 준비를 하는 것과 현장에서 그렇게 운전하는 것은 좀 다른 개념으로 접근해야 할 것 같습니다
'전기 Engineering > 단선도에 포함된 모든 정보' 카테고리의 다른 글
| 저압 수전 계통의 단락 전류 계산 (1) | 2023.10.15 |
|---|---|
| 규격별 변류기의 정격 (Rating of CT - Current Transformer) (0) | 2023.09.14 |
| 지락 과전류 계전기 (50/51N, 50/51G) 의 설치와 결선 및 정정 방법 (0) | 2023.09.09 |
| 과전류 계전기 (50/51)의 적용 및 정정 방법 (0) | 2023.09.08 |
| 차단기의 정격 전류 선정 방법 (전동기 보호용) (1) | 2023.07.03 |



