이번 포스팅에서는 앞선 포스팅에서 설명한 방향성 계전기의 개념에 이어서 동작 원리에 대해서 다루어 보겠습니다. 방향성 계전기에 대한 자료에서 필요한 부분을 발췌하여 하나씩 설명드리고 있습니다.
1. 동작 원리 (Principal of Operation)
방향성 계전기는 어떻게 작동합니까? 배전 네트워크가 AC 네트워크이고 전류의 방향은 계속해서 변한다는 것을 염두에 두고서 계전기는 전류의 흐름 방향을 어떻게 인식합니까?
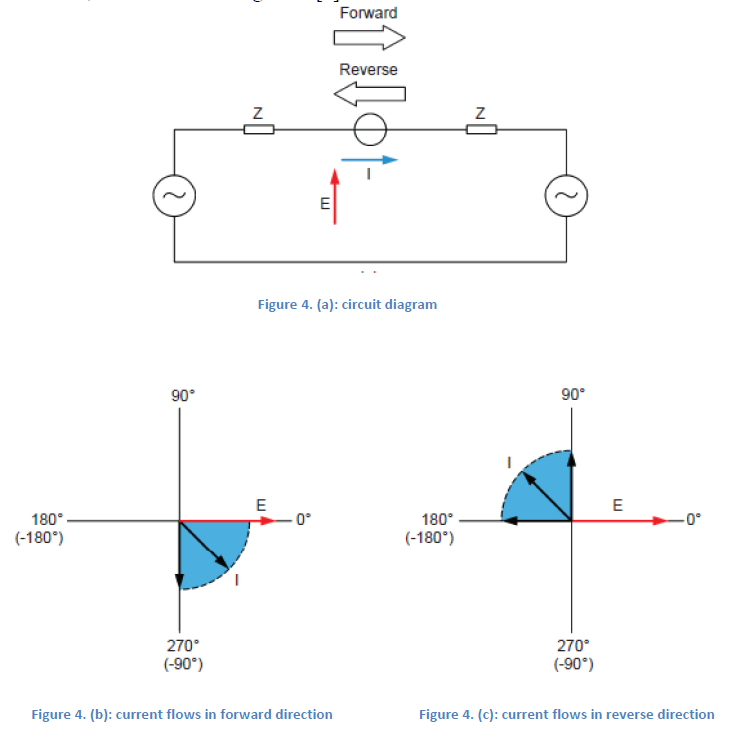
이에 대한 해결책은 AC 전력망에서 전류 흐름의 방향은 회로의 임의의 주어진 지점에서 전압 E와 전류 I 사이의 위상 이동으로부터 결정된다는 것입니다. 이는 그림 3의 도움으로 설명될 것입니다.


회로에서 전류가 왼쪽에서 오른쪽으로 흐를 때 전압과 전류 간 위상 변이의 절대값이 90° 이하(그림 3b)로, 정확한 위상 변이의 값은 회로 임피던스 Z의 값에 의존합니다. 이 방향은 일반적으로 정방향으로 간주됩니다. 한편, 회로에서 전류가 오른쪽에서 왼쪽으로 흐를 때 전압과 전류 간 위상 변이의 절대값이 90° 이상(그림 3c)으로 정확한 값은 회로 임피던스 Z의 값에 의존합니다. 이 방향은 일반적으로 역방향으로 간주됩니다.
대부분의 전력망에서 임피던스는 저항-유도 특성을 갖습니다. 이 경우 전류의 위상각 값의 예상 범위는 그림 4와 같이 전류 흐름의 각 방향에 대해 90°로 줄어듭니다. [4]
방향성 과전류 릴레이와 그 주요 파라미터의 작동은 아래에 설명되어 있습니다:
- 방향성 과전류 계전기는 과전류 계전기와 전류의 흐름 방향을 결정하는 방향성 요소로 구성됩니다. 이 두 장치는 미리 정해진 전류 크기와 방향에 대해 공동으로 작동합니다. 계전기는 한 방향의 고장으로 전류가 흐를 때와 계전기가 작동하지 않는 최대 전류보다 높을 때에만 활성화됩니다.
- 방향성 과전류 릴레이는 2개의 전류와 2개의 전압을 측정하는 방식으로 2개의 상에서 라인 전류를 모니터링할 수 있습니다. 이런 식으로 모든 상간 고장을 감지할 수 있습니다. 3개 상에서 모두 라인 전류를 모니터링하는 경우 릴레이는 3개의 전류와 3개의 전압을 측정합니다. 이를 통해 모든 상간 고장뿐만 아니라 모든 대지간 고장을 감지할 수 있습니다.
- 전기기계식과 정지형 방향성 과전류 계전기에서 A 상의 기준전압은 일반적으로 전압 EBC(VBC)이며 예상했던 것처럼 상전압 EA(VA)가 아닙니다. 이는 A 상에서 접지 고장이 발생할 때 전압 EBC가 영향을 받지 않기 때문에 보다 안정적인 기준전압을 제공합니다. B 상과 C 상도 이와 유사합니다. 이러한 로직은 현대의 방향성 과전류 계전기(디지털 및 수치제어)에는 사용할 수 없습니다. 이는 현대의 계전기는 일반적으로 A 상의 기준전압으로 상전압 EA를 사용하고 훨씬 더 안정적인 기준전압을 얻기 위해서 특별한 기술을 사용하여 때문입니다. 그러나 여전히 전기기계식과 정지형 계전기의 방식을 공부하는 것에는 이러한 원리와 세팅 방식을 현대의 방향성 계전기에서도 사용하고 있고 기준 전압으로 상전압이 아닌 선간 전압을 적용하기도 하기 때문입니다.
- 기준 전압은 방향성 과전류 계전기의 정방향 영역과 역방향 영역을 적절히 정렬하기 위해 회전될 수 있습니다. 이러한 회전 각도를 특성 각도라고 합니다. Fig.5는 라인 전압 EBC를 기준 전압으로 했을 때 특성 각도의 두 값에 대한 정방향 영역과 역방향 영역을 보여줍니다.

이미 언급한 바와 같이 전류 방향을 검출하기 위해서는 전압과 단락 전류 사이의 위상 변위를 파악해야 합니다. cos(φ) ≥ 0 (π/2 ≤ Φ ≤ π/2)일 때는 방향성 계전기에 의해 보이는 액티브 파워가 양수입니다. cos(φ) ≤ 0 (π/2 ≤ Φ ≤ 3π/2)일 때는 방향성 계전기에 의해 보이는 액티브 파워가 음수입니다.
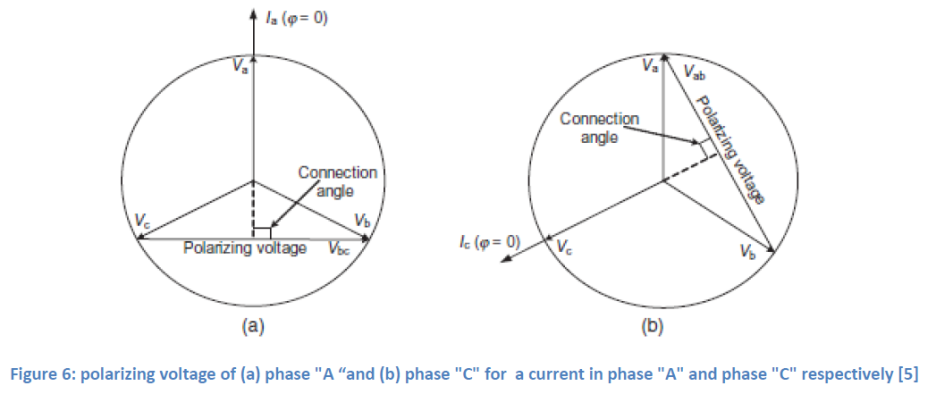
변위 φ은 편광 전압을 기준으로 위상 전류를 비교하여 결정할 수 있습니다. 이 설명은 전기기계 및 정지형 계전기에 대해 수행될 것이며, 전류가 A 상에 있을 경우 편광 전압은 φ=0에서 전류 Ia에 수직인 EBC(VBC)가 됩니다(그림 6a). 마찬가지로 전류가 C 상에 있을 경우 편광 전압은 VAB가 되고 전압은 φ=0에서 전류에 수직이 됩니다(그림 6b). 위상 전류와 선택한 편광 전압 사이의 각도를 연결 각도라고 하며 φ=0일 때 90°의 값을 갖습니다.
트리핑 존은 특성 각도 θ으로 정의되는 반평면입니다. 이 각도는 편광 벡터와 경계선에 수직인 선 사이의 각도입니다(그림 7). 이 각도의 일반적인 값은 30°, 45° 또는 60°입니다. 각도의 중요성 때문에 이 각도에 대해서는 다음 장에서 더 간단히 설명하겠습니다.
상 전류 Ia는 θ-π/2< ψ1< θ+π/2일 때 트리핑 존에 있고 나머지 반평면은 난트리핑 존에 있음을 알 수 있습니다. 전류 Ic에 대해서도 비슷한 결론을 내릴 수 있습니다. 이 전류는 θ-π/2< ψ3< θ+ π/2일 때 트리핑 존에 있고 다른 모든 각도에 대해서는 난트리핑 존에 있습니다. 각도 ψ1과 ψ3은 각각 φ1과 φ2에 해당합니다(φi= ψi+90°)
2. 특성 각도 (Characteristic Angle)
고장의 방향을 결정하기 위해 보호 장비는 전류와 분극 변수(polarisation variable) 사이의 위상 변위를 측정합니다. 분극 변수가 원하는 계전기 동작의 대칭축에 있지 않은 경우 특성 각도를 조정하여 위상을 재설정해야 합니다. 이 각도는 보호 협조 (protection coordination) 설계 과정에서 결정되어야 합니다. 선택한 방향의 고장은 트리핑 존에 떨어지는 전류를 유발하고 반대 방향의 전류는 이 존 밖으로 떨어지는 전류를 유발합니다. 분석은 특성 각도 θ = 30°, θ = 45° 및 θ = 60°의 일반적인 값과 세가지 고장 즉 A와 B 사이의 상간 고장, A와 C 사이의 상간 고장 그리고 대지간 고장에 대해 수행됩니다. 이 세 가지 고장은 개별적으로 분석됩니다. 또한 임피던스의 저항-유도 특성도 가정합니다 (이 가정은 거의 항상 사실입니다).
상 A에서 대지간 고장이 발생했을 때 예상되는 전류 IA의 위상 각도 값 범위는 그림 8과 같습니다.


상 A와 B 사이 및 상 A와 C 사이의 상간 고장에 대해 예상되는 전류 IA의 위상 각도 값 범위는 그림 9에 나와 있습니다:
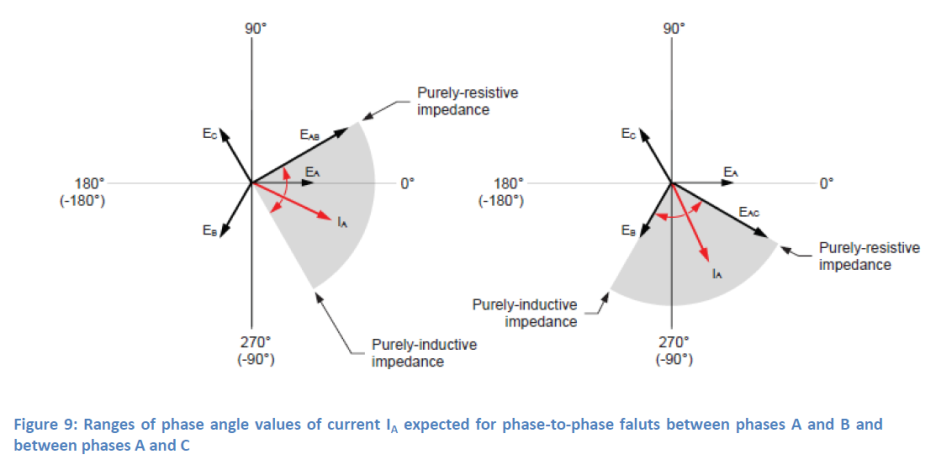
그림 8과 그림 9의 현재 IA의 위상각 값 범위의 중첩이 그림 10에 표시되어 있습니다.

그림 10에서 볼 수 있듯이, 총 범위는 150°입니다. B 상과 C 상에 대해서도 동일한 분석을 수행할 수 있으며, 결과는 동일할 것입니다. 즉, 전류의 위상각 값의 총 범위도 150°입니다.
이미 말했듯이 특성 각도에 대한 통상적인 값은 30°, 45°, 60°입니다. 45°의 각도에 대해 작동 원리를 먼저 설명하고 이를 바탕으로 30°, 60°의 특성 각도에 대해서도 설명할 것입니다.
특성 각도를 45°로 설정하면 그림 11과 같이 방향 과전류 계전기의 정방향 및 역방향 영역이 A 상에 대해 예상되는 고장 전류 벡터와 적절히 정렬됩니다.
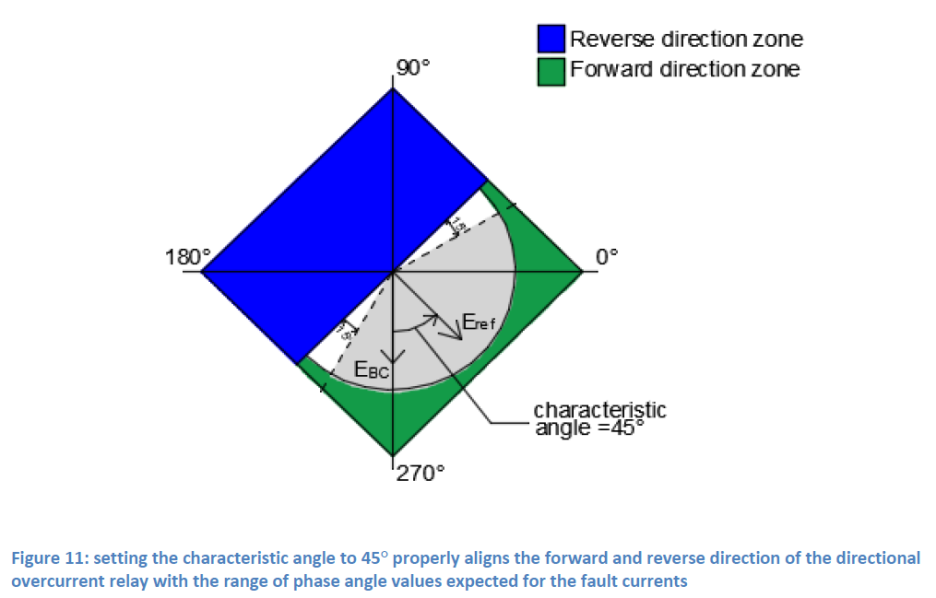
이 그림을 통해 전류의 위상각 예상값의 각 면에 안전 마진이 15°인 상 A의 예상 범위가 있으면 전방 방향 영역이 모든 면을 에워싸는 것을 알 수 있습니다. 이를 통해 방향성 과전류 계전기의 최적 작동이 보장됩니다. 이 15° 안전 마진은 상간 고장에 대한 것이며, 이러한 고장 중 하나에 대한 한쪽 사이드의 것입니다. 대지간 고장에는 상간 고장을 보호하는 "자연스러운" 마진이 있으므로 이 고장에 대해서 특성 각도를 조정할 필요가 없습니다. 즉, 언급된 두 상간 고장을 모두 포함하면 도 대지간 고장도 보호됩니다.
특성 각도를 30° 및 60°로 설정하면 다음 그림을 얻을 수 있습니다:

앞의 그림에서 알 수 있듯이, 특성 각도가 30° 또는 60°일 때 세 가지 고장이 모두 커버됩니다. 오직 차이는 마진에 있는데, 어느 쪽에 있고 값은 얼마입니까? 이 두 경우 안전 마진은 30°이지만 한 쪽에만 있습니다.
참고 자료: DIRECTIONAL PROTECTION
Seminar work in the course Distribution and industrial networks (UNIVERSITY OF LJUBLJANA
FACULTY OF ELECTRICAL ENGINEERING DIRECTIONAL)
'전기 Engineering > 전기 시스템의 계산과 분석' 카테고리의 다른 글
| 전동기의 와이-델타 (Y-D) 기동 시퀀스 (0) | 2024.03.07 |
|---|---|
| 방향성 계전기의 적용 방법 (1) | 2024.02.07 |
| 조명 설계 - 조도 계산 (1) | 2024.01.04 |
| Selectivity(선택성) in MV/HV network protection (1) | 2024.01.02 |
| Cable Pulling Tension Calculation (3) | 2023.12.31 |



