이번 포스팅은 고압 모터의 기동 방법 6가지에 대하여 알아야 할 부분들을 살펴보고 각각의 기동법의 장단점을 살펴보려고 합니다. 현업에서 어떤 기동 방식을 선택할지 결정할 때 도움이 되리라 봅니다. 개인적인 경험에 의한 보충 설명도 포함되어 있습니다.
무식한 방식에서 인텔리전트 모터 스타트로
AC 유도 모터는 현대 세계 경제의 핵심 요소입니다. 이 모터는 전 세계 산업 시설에서 생산성과 효율성을 높이는 장비에 동력을 공급하는 데 사용됩니다. 그러나 많은 산업 활동은 모터 기동 과정에서 자신도 모르게 기계에 극심한 스트레스를 가합니다.
고압 모터를 시동하는 6가지 방법에 대해 알아야 합니다 (사진: 고압 모터 제어 기동기 유형 Ampgard, Eaton의 LV 캐비닛)
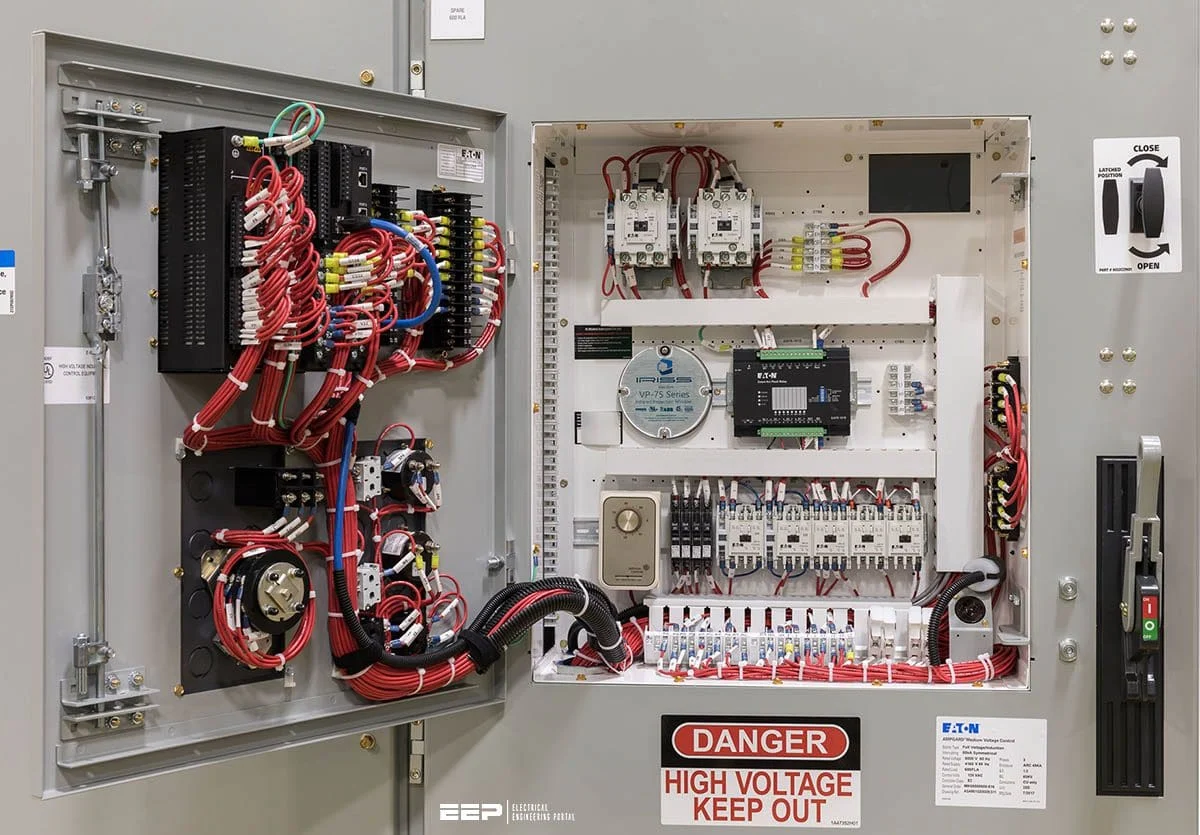
Six different ways to start a medium-voltage motor you should know about (on photo: LV cabinet of a medium voltage motor control starter type Ampgard, Eaton)
모터 운전이 시작되면 높은 돌입 전류가 모터 권선으로 유입되어 매우 높은 토크를 제공합니다.
많은 펌프 및 팬 시스템이 대부분의 시간 동안 전체 용량보다 낮은 용량으로 작동하고, 속도가 조금만 떨어지면 에너지 사용량에 큰 영향을 미칠 수 있으므로 VSD는 상당한 에너지 절감 효과를 가져올 수 있다는 점에 유의할 필요가 있습니다.
지난 20년 동안 모터 효율이 평균 3~4% 증가했지만, 이 사실은 특히 정격 속도로 연속 운전하는 모터와 비교하면 더욱 그렇습니다.
유도 모터가 전 전압 공급 장치에 연결되면 모터의 정격 전류의 몇 배가 흐르게 됩니다. 부하가 가속되면 일반적으로 사용 가능한 토크가 약간 감소했다가 정점으로 상승하는 반면, 전류는 모터가 최대 속도에 가까워질 때까지 매우 높게 유지됩니다.
이제 모터 기동 방법, 전류, 토크 프로파일 및 설치 개요에 대해 설명하겠습니다.
Table of Contents:
1. Direct on-line starting
1.1 Disadvantages of classic DOL starting
2. Primary resistance starting
2.1 Soft start vs primary resistance starting
2.2 Reduced-Voltage Solid-State (RVSS) Starters
3. Auto-transformer starting
3.1 Soft start vs auto-transformer starting
4. Star-Delta starting
4.1 Soft start/VFD vs star-delta starting
5. Soft starters
6. Variable frequency drives (VFD)
6.1 VFD motor starting
6.2 VFD motor stopping
6.3 VFD motor running
6.4 VFD bypassed
목차:
1. 직입 기동
1.1 직입 기동의 단점
2. 1차 저항 기동
2.1 소프트 스타트 대 1차 저항 기동
2.2 저전압 솔리드스테이트(RVSS) 스타터
3. 단권변압기 기동 (auto-Transformer Starting)
3.1 소프트 스타트 대 단권변압기 기동
4. 스타-델타 기동
4.1 소프트 스타트/VFD 대 스타-델타 기동
5. 소프트 스타터
6. 가변 주파수 드라이브(VFD)
6.1 VFD 모터 기동
6.2 VFD 모터 정지
6.3 VFD 모터 운전
6.4 VFD 우회 (By-pass)
1. 직입 기동 (DOL)
가장 간단한 형태의 스타터는 전자 접촉기와 모터 과부하 보호 장치로 구성된 DOL(Direct On-line) 스타터입니다. DOL 스타터는 일부 산업에서 광범위하게 사용되지만 대부분의 경우 전력 회사에서 전 전압 기동을 허용하지 않습니다.
고압 DOL 제어는 물과 폐수, 펄프와 종이, 석유와 가스, HVAC 등 광범위한 산업 응용 분야를 지원합니다.
전 전압 기동은 접촉기가 닫히는 순간 전류가 0에서 회전자 구속 전류(LRC)로 전환됩니다. LRC는 일반적으로 모터 FLC의 5~10배 사이입니다. 빠르게 상승하는 전류 과도현상은 공급 측에 전압 과도현상을 유발하고 전 부하 조건에서 예상되는 전압 변동의 6~9배를 유발합니다.
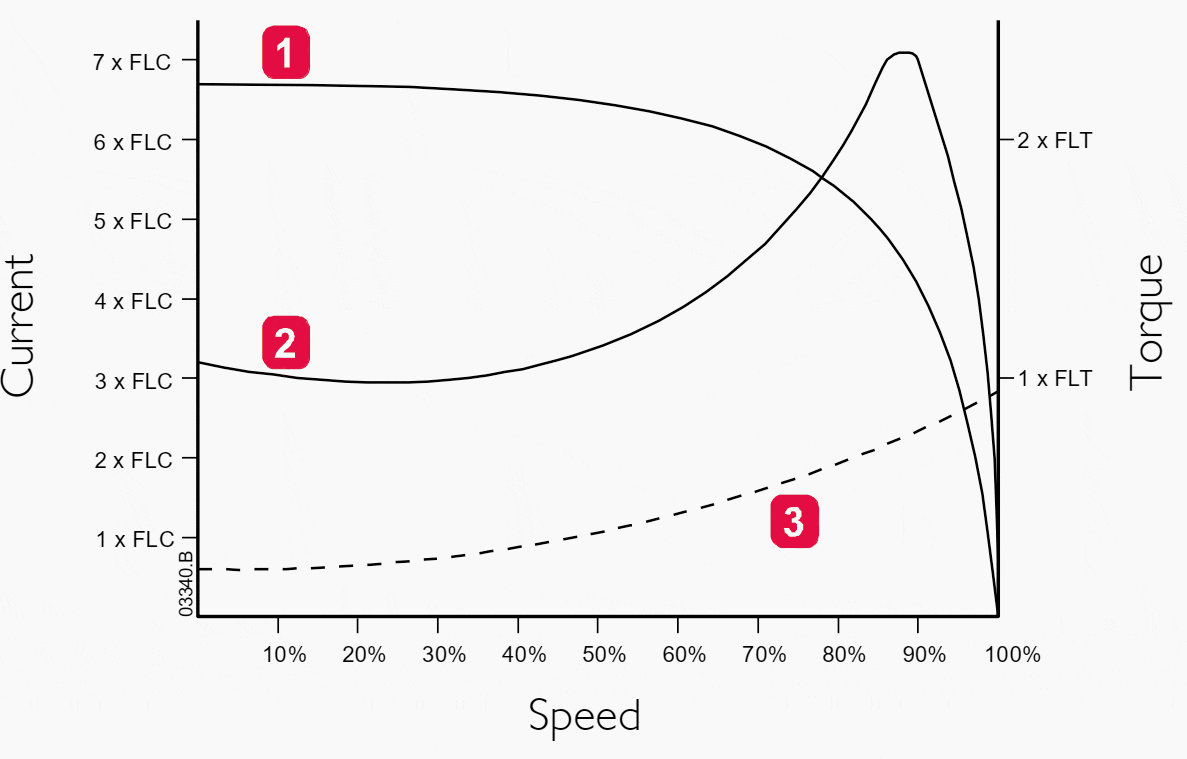
Figure 1 – Current and torque profile for DOL starting
여기서 곡선 숫자는 다음을 의미합니다:
1. 전 전압 모터 전류
2. 전 전압 모터 토크
3. 부하 토크(2차 부하, 예: 펌프)
또한 전 전압 기동은 접촉기가 닫히는 순간 토크가 0에서 회전자 구속 토크로 과도하게 전환됩니다. 순간적인 토크 인가는 모터, 구동 시스템 및 기계에 심각한 기계적 충격을 일으킵니다. 토크 과도현상으로 인한 손상은 최대 토크 진폭으로 인한 손상보다 더 심각합니다.
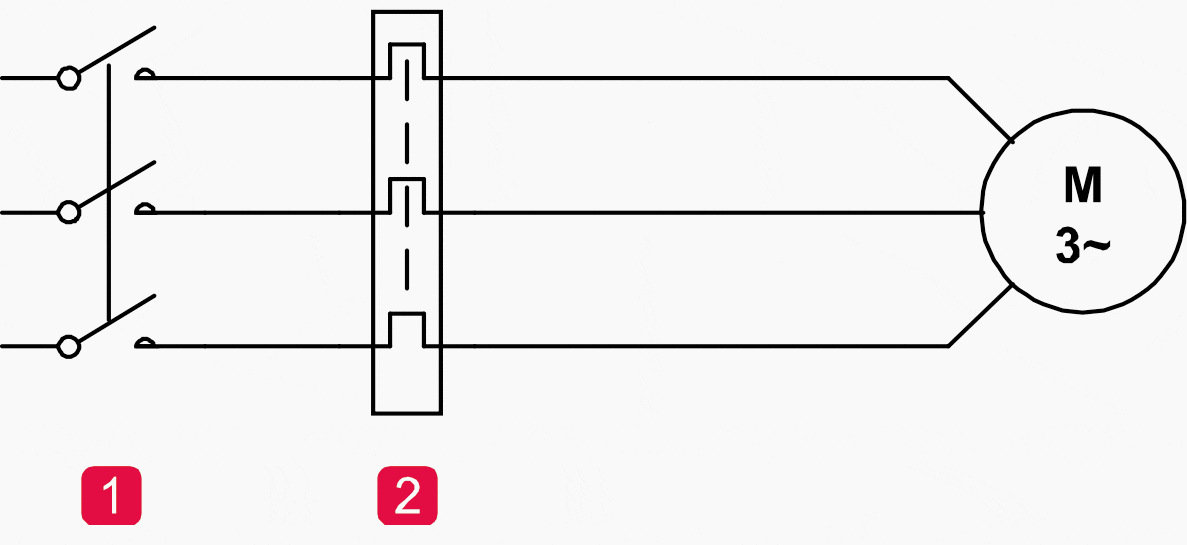
Figure 2 – DOL starter installation
여기서:
1. Main contactor (주 전자 접촉기)
2. Overload relay (과부하 계전기)
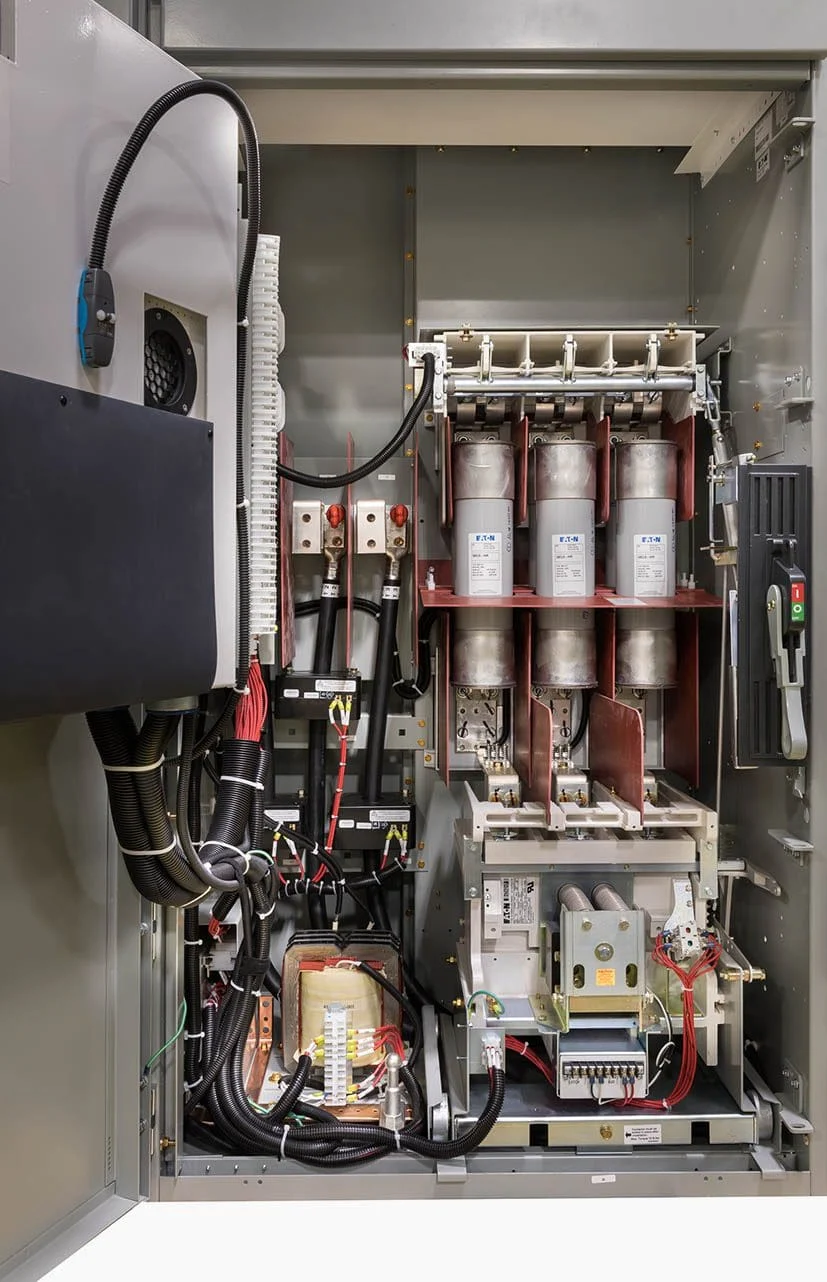
Figure 3 – Modern full voltage (direct-on-line) motor started, type ‘Ampguard’ by Eaton
1.1 전통적인 DOL 기동의 단점
1) 높은 돌입 전류는 모터 권선에 응력을 발생시킵니다. 이 응력으로 인해 권선이 고정자의 엔드 턴에서 움직이게 됩니다. 그러면 절연 파괴가 일어납니다. 결국 상간 단락이 발생하여 조기 모터 고장이 발생합니다.
2) 전 전압 기동은 애플리케이션 구동 트레인 전체의 벨트, 휠, 기어박스 및 기타 기계 부품에 손상을 일으켜 운전 정지와 부품 교체 비용을 초래합니다.
대부분의 경우 운전 정지가 발생하여 업계에서 가장 비용이 많이 드는 모터 제어 방법으로 입증되었습니다.
3) 전 전압 기동 시 선로 차단/전압 강하가 발생하여 유틸리티 회사로부터 불이익을 받을 수 있습니다. 대형 모터가 생성할 수 있는 선로 차단은 발전소 전체의 다른 애플리케이션에도 문제를 일으킬 수 있습니다.
4) 직입 기동은 접촉기 접점에 큰 스트레스가 가해지므로 상대적으로 많은 양의 유지 보수가 필요합니다.
5) 20%의 정확도를 가진 과부하 계전기를 사용하여 모터 보호 기능이 떨어집니다.
6) 감속을 제어할 수 있는 기능이 없습니다.
(그런데 이러한 단점에도 불구하고 제가 경험한 석유 화학 공장에서는 대부분 직입 기동을 선택하였습니다. 운전이 단순해서 고장의 요소가 적은 것이 중요한 이유입니다. 그리고 기계를 제작할 때 직입 기동임을 고려해서 제작하기 때문에 실제로 기계가 문제를 일으키는 경우도 적습니다. 다만 이런 조건을 만족시키기 위해서 기계 가격이 상승하게 되는 것이 단점이 됩니다. 석유 화학 공장은 비용을 줄이는 것보다는 운전의 연속성 고장이 나지 않는 것에 더 중점을 두는 것 같습니다.)
2. 1차 측 저항 모터 기동
1차 저항 스타터는 전자 접촉기와 모터 사이에 각 상에 직렬로 연결된 저항기를 사용하므로 기동 전류와 토크가 제한됩니다. 저항기는 권선형 저항기, 주조형 저항기 또는 액체 저항기가 있습니다.
모터 전류는 라인 전류와 같고 기동 토크는 전류 감소 비율의 제곱으로 감소합니다. 전류 감소는 추가된 1차 저항과 모터 임피던스의 합에 대한 모터 임피던스의 비율에 따라 달라집니다.
모터가 가속하면 고정자 임피던스가 증가하여 속도에 따라 고정자 전압이 증가합니다. 모터가 최대 속도에 도달하면 저항을 두 번째 접촉기로 우회하여 모터에 전 전압을 공급합니다. 초기 기동 전압은 사용된 저항의 값에 따라 결정됩니다.
저항의 값이 너무 높으면 모터를 전속력으로 가속할 수 있는 토크가 충분하지 않고 전압이 높아지면 전류와 토크도 높아집니다.
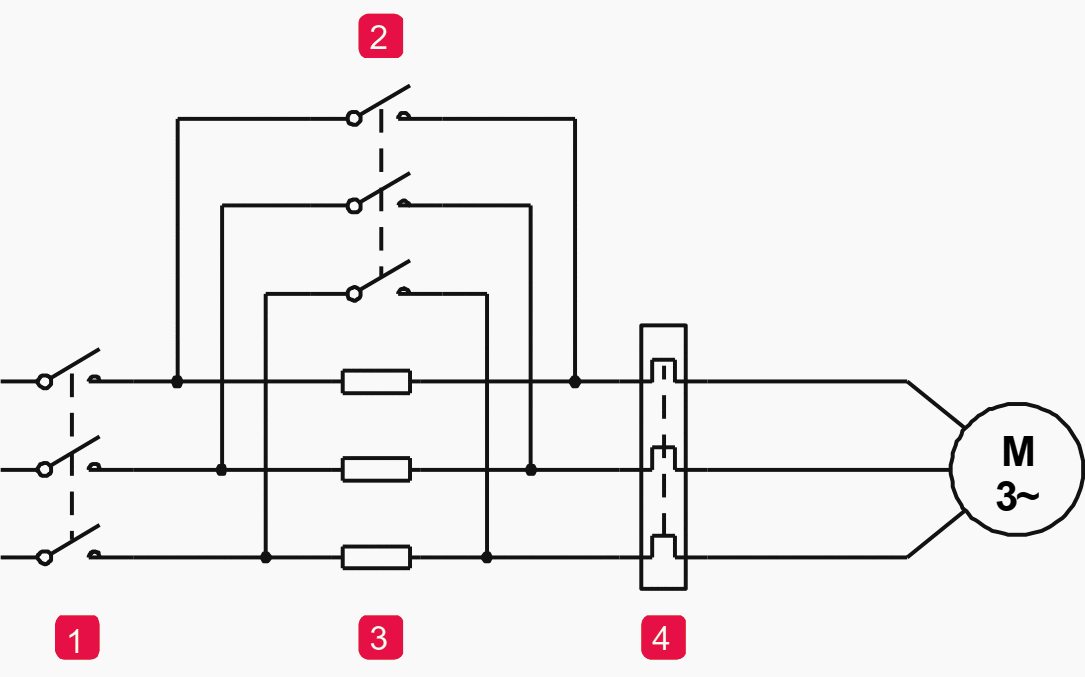
Figure 4 – Primary resistance starter
여기서:
1. Main contactor (주 전자 접촉기)
2. Run contactor (운전 전자 접촉기)
3. Start resistors (직렬 저항)
4. Overload relay (과부하 계전기)
감압 기동 시간은 미리 설정된 타이머에 의해 제어되는데, 애플리케이션에 맞게 올바르게 설정되어야 합니다. 시간이 너무 짧으면 저항을 우회하기 전에 모터가 최대 속도에 도달하지 못합니다. 과도한 시작 시간은 모터와 저항이 불필요하게 가열되게 합니다.
전류와 토크를 보다 정확하게 제어하기 위해 여러 단계의 저항을 사용하고 단계별로 연결할 수 있습니다. 이를 통해 전류 및 토크 단계의 크기를 최소화할 수 있습니다.
1차 저항 스타터는 저항기 전반에 걸쳐 높은 전류와 높은 전압으로 인해 시동 중에 많은 에너지를 소모합니다. 장시간 또는 잦은 시동의 경우 저항기가 물리적으로 크므로 환기가 잘 되어야 합니다.
1차 저항 스타터는 폐쇄 전환 스타터이므로 '폐쇄' 과도현상의 영향을 받지 않습니다.
Figure 5 – Start performance characteristics of a correctly selected primary resistance starter
여기서:
1. Full voltage start current (전 전압 기동 전류)
2. Primary resistance start current (1차 측 저항 기동 전류)
3. Full voltage torque (전 전압 토크)
4. Primary resistance torque (1차 측 저항 토크)
5. Load torque (부하 토크)
Figure 6 – Start performance characteristics of an incorrectly selected primary resistance starter
여기서:
1. Full voltage start current (전 전압 기동 전류)
2. Primary resistance start current (1차 측 저항 기동 전류)
3. Full voltage torque (전 전압 토크)
4. Primary resistance torque (1차 측 저항 토크)
5. Stall point (멈춤 위치)
6. Current and torque transient (전류와 토크 과도현상)
(1차 측 저항 기동 방식은 제 경험으로는 한 번도 사용한 적이 없습니다. 어떤 특정 플랜트에서는 사용할 수 있겠지만 석유 화학 공장에서는 사용하지 않는다고 보셔도 될 겁니다. 저항에서 열이 많이 나고 단권변압기 기동에 비해서도 이점이 별로 없기 때문인 것 같습니다.)
2.1 소프트 스타트는 고전적인 1차 저항 스타트와 어떻게 비교됩니까?
1차 저항 스타터에 비해 소프트 스타터는 더 유연하고 안정적입니다. 1차 저항 스타터는 다음과 같은 이유로 성능이 제한적입니다:
1) 기동 토크를 모터 및 부하 특성에 맞게 미세 조정할 수 없습니다.
2) 각 전압 단계에서 전류 및 토크 과도현상이 발생합니다.
3) 크기가 크고 비쌉니다.
4) 액체 저항 버전은 자주 유지 보수해야 합니다.
5) 저항이 가열됨에 따라 기동 성능이 변경되므로 다중 또는 재기동 상황이 잘 제어되지 않습니다.
6) 변화하는 부하 조건 (예: 부하 또는 무부하 기동)을 수용할 수 없습니다.
7) 소프트 스톱을 제공할 수 없습니다
2.2 감압 솔리드 스테이트(RVSS) 스타터
감압 솔리드 스테이트 스타터는 부드러운 가속을 위해 전압을 모터 정격까지 증가시킴으로 기동 전류를 제한합니다. 모터가 최대 속도에 도달하면 바이패스 접촉기가 닫히므로 모터에 전체 전압이 공급됩니다.
기동 토크를 낮추는 리액터 및 단권변압기 스타터와 유사하게 RVSS 기술은 기동 및 램프 (증가 기울기) 설정을 조정할 수 있습니다. 모터가 낮은 토크 조건에서 부하를 기동할 수 있도록 하는 것이 매우 중요합니다.

Figure 7 – Reduced-voltage solid state (RVSS) starter, type ‘Ampgard RVSS’ by Eaton
감압 솔리드 스테이트(RVSS)의 "부드러운" 기동이 바람직한 이유는 무엇입니까?
1) 기계 부품의 충격 방지
2) 커플링 및 샤프트 손상 방지
3) 로터 및 권선 고장 방지
4) 구동 벨트 삐걱거림 및 파손 중지
5) 배관의 워터 해머 방지
6) 펌프 모터 소프트 정지
7) 밸브가 부드럽게 닫히도록 압력을 감소
8) 서지파 방지
9) 최대 기동 전류 감소
10) 모터 기동 시 전압 강하 감소
(이 기동 방식은 소위 소프트 스타터 "Soft Starter"로 불리면서 꽤 사용되는 기동 방식입니다. 주로 고압에서 인버터 대용으로 사용됩니다. 다만 기동 토크를 맞출 수 있는지에 대해서는 면밀한 검토가 필요합니다. 한 프로젝트에서 현장에 납품된 대용량 소프트 스타터가 모터를 기동시키지 못해서 아주 어려움을 겪었습니다. )
3. 단권변압기 모터 기동
단권변압기 스타터는 단권변압기를 사용하여 기동 시에 전압을 줄입니다. 변압기에는 기동 전압을 설정하는 데 사용할 수 있는 다양한 출력 전압 탭이 있으며, 기동 시간은 타이머에 의해 제어됩니다. 모터 전류는 기동 전압 감소에 의해 감소하고 변압기 작동에 의해 더 감소하여 실제 모터 전류보다 적은 라인 전류를 생성합니다.
초기 라인 전류는 전압 감소의 제곱으로 감소된 회전자 구속 전류(LRC)와 동일합니다. 단권변압기의 50% 탭에서 기동되는 모터의 기동 선 전류는 LRC의 1/4이고 기동 토크는 LRT의 1/4입니다.
기동 전압이 너무 낮거나 기동 시간이 너무 짧으면 모터가 전속력보다 작은 상태에서 전체 전압으로 전환되어 높은 전류 및 토크 스텝이 발생합니다.
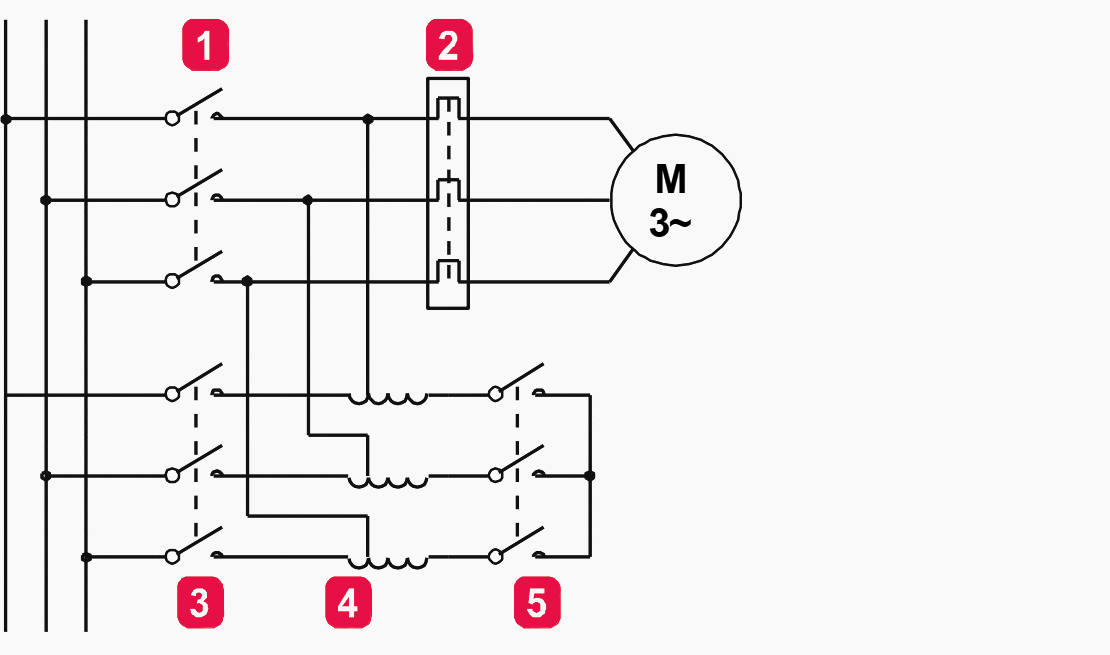
Figure 8 – Auto-transformer connection
여기서:
1. Run contactor (운전용 전자 접촉기)
2. Thermal overload (과부하 계전기)
3. Start contactor (A) (기동 전자 접촉기)
4. Auto-transformer (단권변압기)
5. Start contactor (B) (기동 전자 접촉기)
가장 간단한 단권변압기 스타터는 단일 단계이며 보통은 두 단계까지만 제어합니다. 더 정교한 스타터는 초기 시작 탭에서 전체 전압까지 가속하면서 두 단계 이상의 전압 단계를 밟을 수 있습니다.
단권변압기 스타터는 일반적으로 기동을 자주 하지 않는 것을 기준으로 정격을 결정합니다. 잦은 기동 등급 또는 기동 시간이 긴 등급의 단권변압기는 변압기의 가열로 인해 크고 비쌉니다. 기동 변압기 스타터는 개방형 전환 스타터로 구성할 수 있지만, 가장 일반적으로 콘도르퍼 (Korndorfer) 폐쇄형 전환 구성을 사용하여 '재폐로' 과도현상을 제거합니다.
유도 전동기의 감압 소프트 스타트는 콘도르퍼 (Korndorfer) 스타터 기술을 사용합니다. 회로에는 3상 단권변압기와 3상 스위치가 사용됩니다.
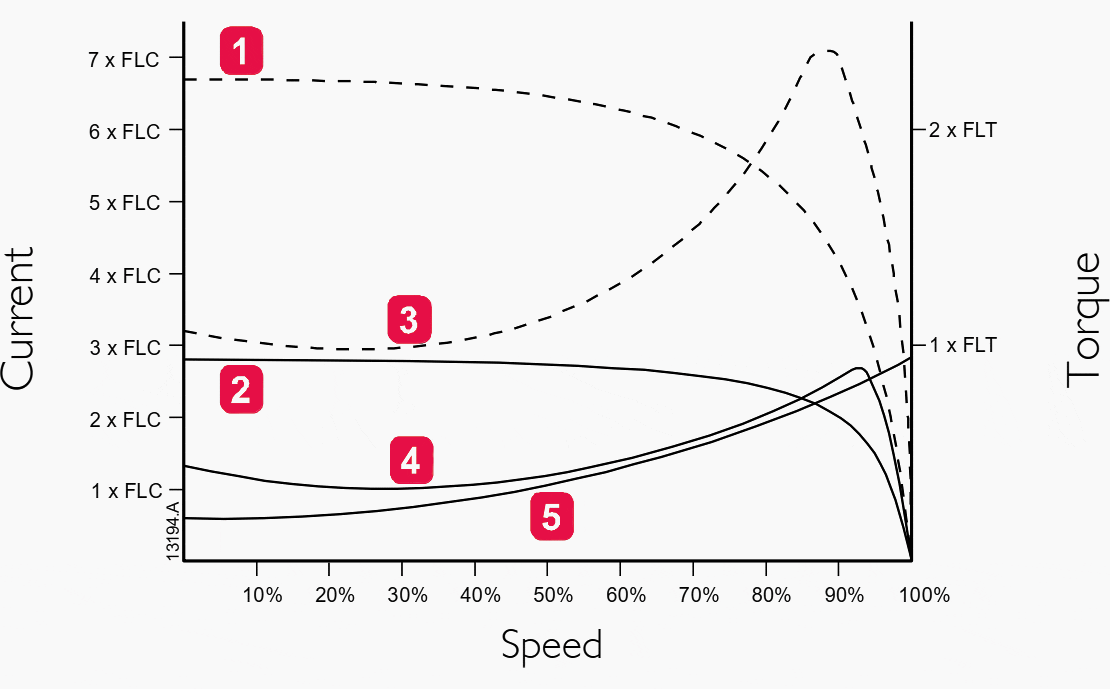
Figure 9 – Start performance characteristics of a correctly selected auto-transformer starter
여기서:
1. Full voltage start current (전 전압 기동 전류)
2. Auto-transformer start current (단권변압기 기동 전류)
3. Full voltage torque (전 전압 토크)
4. Auto-transformer torque (단권변압기 토크)
5. Load torque (부하 토크)
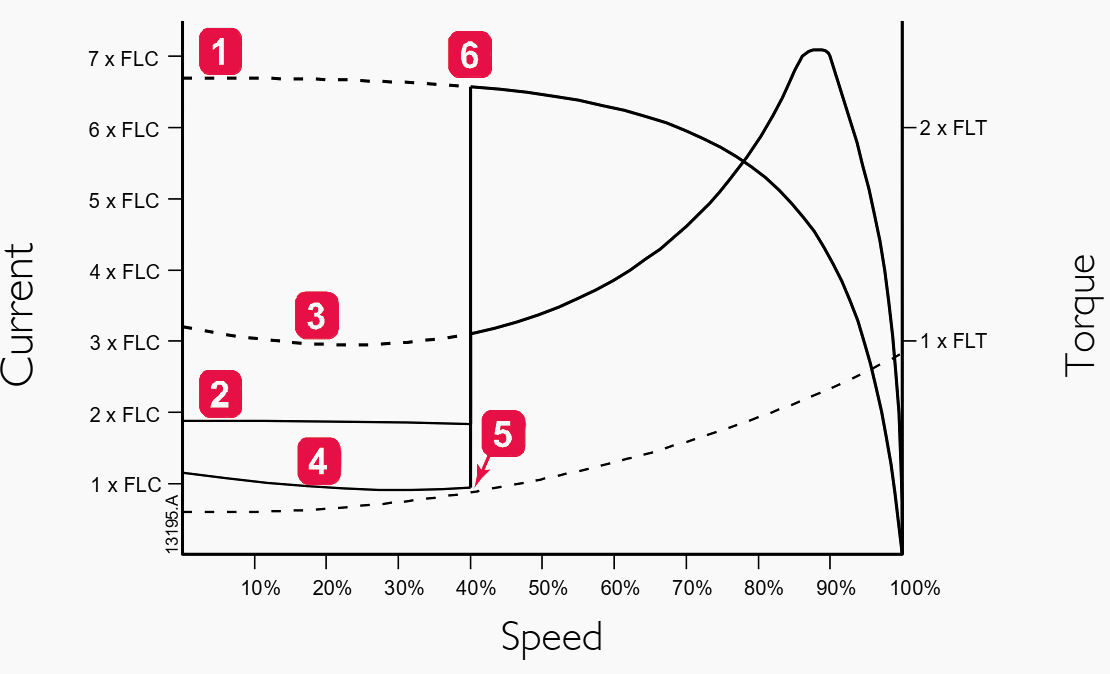
Figure 10 – Start performance characteristics of an incorrectly selected auto-transformer starter
여기서:
1. Full voltage start current (전 전압 기동 전류)
2. Auto-transformer start current (단권변압기 기동 전류)
3. Full voltage torque (전 전압 토크)
4. Auto-transformer torque (단권변압기 토크)
5. Stall point (멈춤 위치)
6. Current and torque transient (전류와 토크의 과도현상)
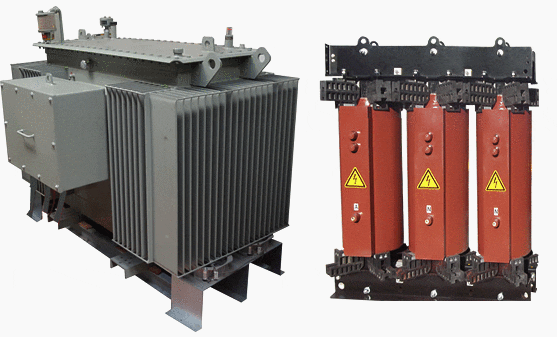
Figure 11 – How it looks like: Auto-Transformer Motor Starting
3.1 소프트 스타트를 단권변압기 기동과 비교하면?
단권변압기 기동기에 비해 소프트 스타터는 훨씬 더 유연하고 훨씬 부드러운 기동을 제공합니다. 단권변압기 스타터는 다음과 같은 이유로 제한된 성능을 제공합니다:
1) 모터 및 부하 특성에 맞게 기동 토크를 조정할 수 있는 기능은 제한적입니다.
2) 전압 단계 간에 여전히 전류 및 토크 과도현상이 존재합니다.
3) 크기가 크고 비쌉니다.
4) 기동이 빈번한 경우 특히 비용이 많이 듭니다.
5) 변화하는 부하 조건(예: 부하 또는 무부하 기동)을 수용할 수 없습니다.
6) 소프트 스톱을 제공할 수 없습니다.
4. 와이-델타 모터 기동
와이-델타 스타터는 비용이 저렴하기 때문에 업계에서 가장 일반적으로 사용되는 감압 스타터입니다. 모터는 처음에 와이 결선으로 연결된 다음 미리 설정된 시간이 지나면 모터가 공급 장치에서 분리되어 델타 결선으로 다시 연결됩니다.
와이 결선의 전류와 토크는 모터가 델타로 연결되었을 때 전체 전압 전류와 토크의 1/3입니다.
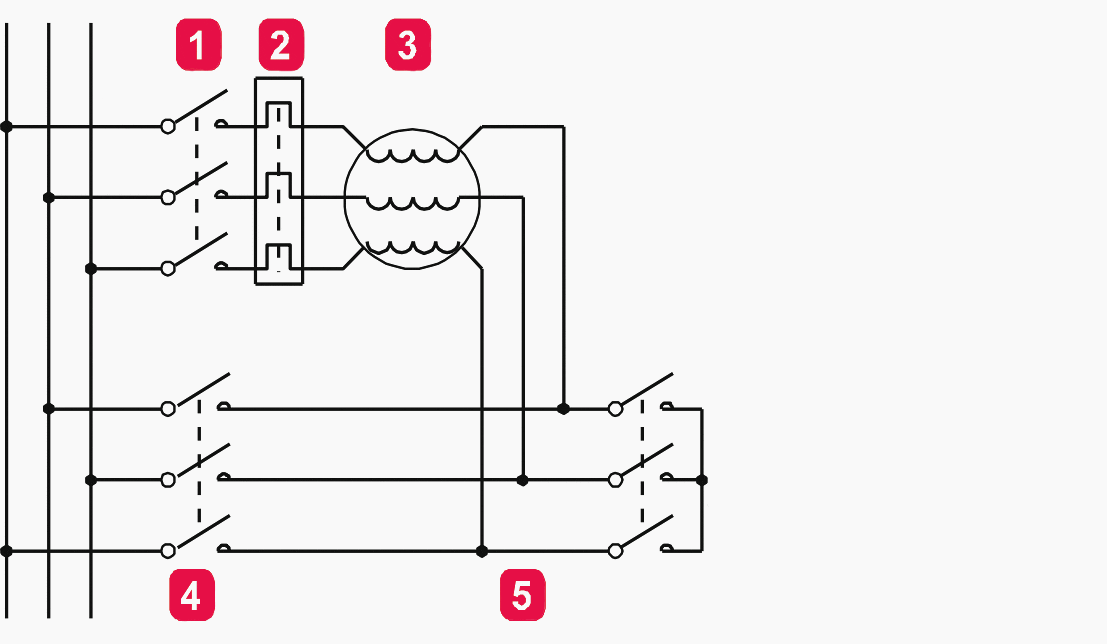
Figure 12 – Star/delta motor starter installation
여기서:
1. Main contactor (주 전자 접촉기)
2. Thermal overload (과부하 계전기)
3. Motor (three-phase) (3상 모터)
4. Delta contactor (델타 전자 접촉기)
5. Star contactor (와이 전자 접촉기)
와이 및 델타 결선은 고정된 값의 전류와 토크를 제공하며 애플리케이션에 맞게 조정할 수 없습니다.
와이 결선이 부하를 최대 속도로 가속할 수 있는 충분한 토크를 제공하지 않는 경우 더블 케이지 모터와 같은 높은 기동 토크 모터를 사용해야 합니다. 와이에서 모터가 최대 속도에 도달하지 못하고 델타 결선으로 전환하면 감압 기동의 목적을 잃고 높은 전류 및 토크 단계가 발생합니다.
대부분의 와이 델타 스타터는 개방형 전환 스타터이므로 와이에서 델타로의 전환은 높은 계단 상승 외에도 매우 높은 과도 전류 및 토크를 초래합니다. 폐쇄형 전환 스타 델타 스타터는 복잡성과 비용이 증가하기 때문에 거의 사용되지 않습니다.
폐쇄 전환 스타터는 '재폐로' 영향을 감소시키지만 기동 변수의 제어 가능성을 개선하지는 못합니다.
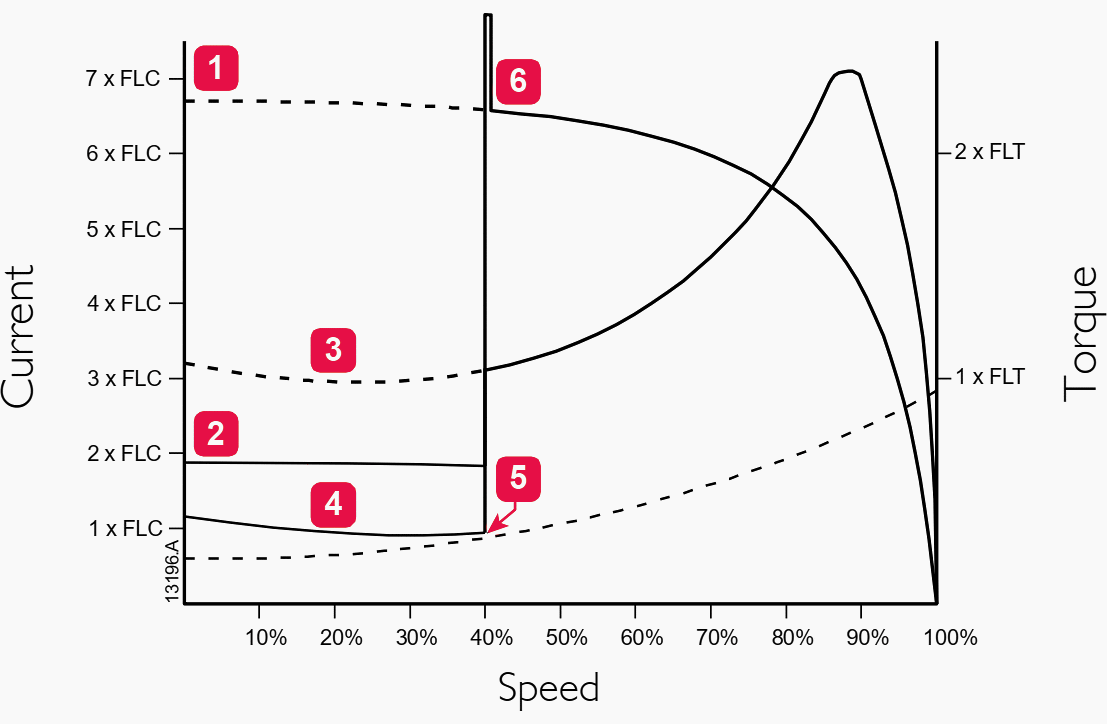
Figure 13 – Start performance characteristics of a star/delta motor starter
여기서:
1. Full voltage start current (전 전압 기동 전류)
2. Star-delta start current (와이-델타 기동 전류)
3. Full voltage torque (전 전압 토크)
4. Star-delta torque (와이-델타 토크)
5. Stall point (전환점)
6. Current and torque transient (과도 전류 와 토크)
4.1 VFD 및 소프트 스타터를 와이-델타 스타터와 비교하면?
와이-델타 스타터와 비교했을 때 소프트 스타터와 VFD는 훨씬 더 유연하고 일시적인 위험 없이 부드러운 기동을 제공합니다. 와이/델타 스타터는 다음과 같은 이유로 제한된 성능을 제공합니다:
1. 기동 토크를 모터 및 부하 특성에 맞게 조정할 수 없습니다.
2. 와이와 델타 전환 사이에는 개방형 전환이 있어 모터 손상을 일으키는 토크와 전류 과도현상이 발생됩니다.
3. 다양한 부하 조건(예: 부하 또는 무부하 기동)을 수용할 수 없습니다.
4. 소프트 스톱을 제공할 수 없습니다.
와이/델타 스타터의 주요 장점은 다음과 같습니다:
1. 소프트 스타터 및 VFD보다 저렴할 수 있습니다.
2. 매우 가벼운 부하를 시동하는 데 사용하면 소프트 스타터 또는 VFD보다 낮은 레벨로 기동 전류를 제한할 수 있습니다. 그러나 심각한 전류 및 토크 과도현상이 여전히 발생할 수 있습니다.
3. Wye-Delta 스타터는 각 권선 세트의 와이어가 단자 리드로 전달되는 특수 권선 모터를 사용합니다. 이러한 권선은 전체 모터 기동 토크를 위해 "Delta" 패턴으로 연결하거나 기동 토크를 줄이기 위해 "Y"(Wye) 패턴으로 연결할 수 있습니다.
4. 델타 패턴에서 모든 권선은 표준 모터에서와 마찬가지로 상간 직렬로 연결됩니다.
"Y" 구성에서 각 상 권선은 공통 지점에서 연결됩니다. 이렇게 하면 모터 자체의 임피던스가 증가하여 전류와 토크가 정상의 33%로 감소합니다. 3개의 접촉기와 타이머를 사용하여 모터에서 가져온 6개의 리드를 2단계 기동 프로세스에서 와이로 연결 후 델타 결선으로 전환합니다.
5. 고압 소프트 스타터
전자식 소프트 스타터는 모터의 각 상에 직렬로 연결된 임피던스를 통해 모터에 인가되는 전압을 제어합니다. 임피던스는 AC 스위치(역병렬 연결 SCR-다이오드 또는 SCR-SCR 회로)로 제공됩니다. 전압은 SCR의 통전 각도를 변경하여 제어합니다.
SCR-SCR 스위치는 대칭 컨트롤러로, 홀수 차수 고조파가 생성됩니다. SCR-다이오드 스위치는 비대칭 컨트롤러로, 모터와 공급 장치에 짝수 차수 고조파 전류가 흐르게 합니다. 짝수 차수 고조파는 모터와 공급 변압기에서 유도되는 손실과 가열 증가로 인해 모터 제어에 바람직하지 않습니다.
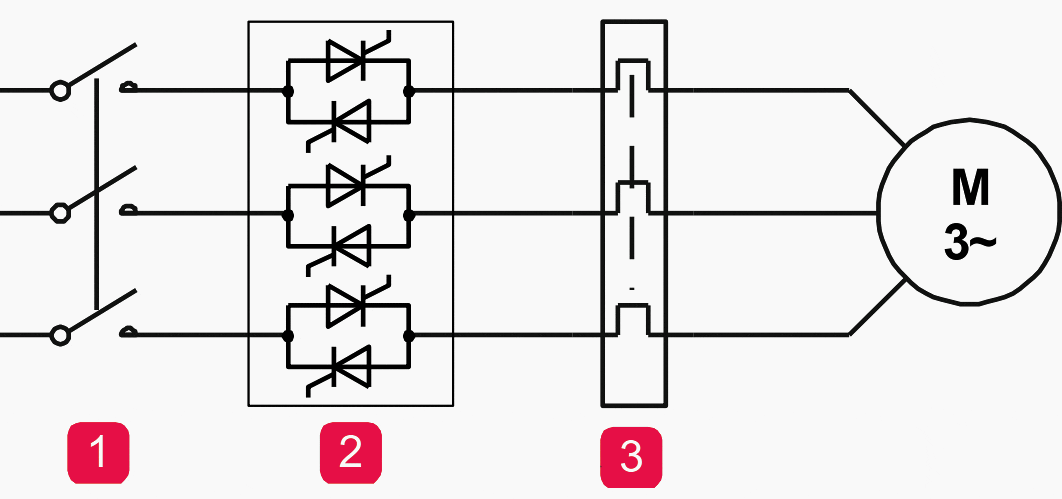
Figure 14 – Soft starter motor control
여기서:
1. Main contactor (주 전자 접촉기)
2. Electronic soft starter (전자식 소프트 스타터)
3. Overload relay (과부하 계전기)
전자식 소프트 스타터는 두 가지 제어 형식으로 구성됩니다.
1. 개방 루프 컨트롤러: 시간 설정 시퀀스를 따릅니다. 가장 일반적인 개방 루프 시스템은 미리 설정된 시작 전압에서 시작하여 미리 설정된 램프 속도로 라인 전압까지 전압이 상승하는 시간 설정 전압 램프입니다.
2. 폐쇄 루프 컨트롤러: 기동 시간 동안 하나 이상의 매개 변수를 모니터링하고 기동 특성을 제어하는 방식으로 모터 전압을 수정합니다. 일반적인 폐쇄 루프 접근 방식은 정전류 및 전류 상승 램프입니다.

Figure 15 – Medium voltage soft starter for heavy-duty motor control – Operation and special applications (on photo: left: Front view of MV soft starter (Aucom, type ‘MVS’) panel with door open, MVS power assembly is located in lower section; center: Side view of MVS panel with panels removed; right: Front view of a typical MVS soft starter)
6. 가변 주파수 드라이브(VFD)
가변 주파수 드라이브(VFD)는 AC(50Hz 또는 60Hz)를 DC로 변환한 다음 DC를 0~250Hz의 가변 출력 주파수 AC로 다시 변환합니다. 모터의 운전 속도는 공급 주파수에 따라 달라지므로 주파수를 제어하면 모터의 속도를 제어할 수 있습니다.
VFD는 기동, 운전 및 정지 중에 모터의 속도를 제어할 수 있습니다.
VFD는 상당한 전자파 방출과 고조파를 발생시키며 일반적으로 필터가 필요합니다. VFD는 가변 속도 구동(VSD) 또는 주파수 변환기라고도 합니다.
드라이브는 기동 돌입 전류를 줄여 모터의 전기적, 기계적 스트레스를 크게 낮춥니다. 드라이브의 도움으로 모터는 제로 속도로 전체 부하 토크 이상을 전달하여 점진적으로 상승하여 모터에 손상을 끼칠 수 있는 갑작스러운 전압 및 전류 과도현상을 조기에 방지할 수 있습니다. 즉, 시스템에 전압 변동을 일으키지 않으면서도 전체 부하 전력을 공급하면서 모터를 가속시킬 수 있습니다.
드라이브는 기본 AC 전원을 기능적으로 정류하고, DC를 가변 주파수 AC로 변환합니다. 운전 전류보다 높지 않은 기동 전류를 사용하면 모터가 부드럽게 가속됩니다.
또한 기동 토크는 변경되지 않으므로 가속할 수 있는 토크가 충분한지에 대한 우려를 줄여줍니다.

Figure 16 – Medium-voltage variable frequency drive: SC9000 EP by Eaton
6.1 VFD 모터 기동
VFD는 모터를 기동할 때 처음에 모터에 낮은 주파수와 전압을 인가합니다. 기동 주파수는 일반적으로 2Hz 이하입니다. 이렇게 하면 모터가 DOL로 기동할 때 발생하는 높은 돌입 전류를 피할 수 있습니다. VFD는 과도한 전류를 끌어들이지 않고 부하를 가속하기 위해 제어된 속도로 주파수와 전압을 증가시킵니다.
다음의 사항들을 주목할 필요가 있습니다:
1. 모터 쪽의 전류는 발생하는 토크에 정비례합니다
2. 모터의 전압은 실제 속도에 정비례합니다
3. 네트워크 측의 전압은 일정합니다
4. 네트워크 측의 전류는 모터가 끌어당기는 전력에 정비례합니다
5. VFD는 기동 전류가 모터 FLC를 초과하지 않기 때문에 공급량이 매우 제한적인 애플리케이션에 이상적입니다.
6.2 VFD 모터 정지
정지 순서는 시작 순서와 반대입니다. 모터에 인가되는 주파수와 전압은 제어된 속도로 하강합니다. 주파수가 0에 가까워지면 모터가 차단됩니다. 부하의 속도를 늦추는 데 도움이 되는 소량의 제동 토크를 사용할 수 있으며, 제동 회로를 추가하면 추가 제동 토크를 얻을 수 있습니다.
4 상한 (quadrant)의 정류기(액티브 프론트 엔드)를 사용하면 VFD가 역방향 토크를 가하고 에너지를 네트워크로 반환하여 부하를 제동할 수 있습니다.
VFD에서 사용할 수 있는 정밀한 속도 제어는 배관 계통에서 해머링을 피하거나 깨지기 쉬운 재료를 운반하는 컨베이어 벨트를 부드럽게 시작하고 멈추는 데 유용합니다.
6.3 VFD 모터 운전
연속 운전 중 속도 조절이 필요한 경우 모터 속도를 제어할 수 있는 기능이 큰 장점입니다. 기계에서 VFD가 단지 긴 기동 및/또는 정지 시간 때문에 필요하다면 VFD가 필요 이상으로 비쌀 수 있습니다.
저속으로 장시간 운전하면(정격 토크가 있더라도) 모터가 과열될 위험이 있습니다. 저속/고토크 장시간 운전이 필요한 경우 일반적으로 외부 팬이 필요합니다. 모터 및/또는 VFD 제조업체는 이 동작 모드에 대한 냉각 요구 사항을 명시해야 합니다.
6.4 VFD 우회 방식
일부 고압 모터 사용 시는 모터를 기동하는 데 VFD가 사용되지만 상용 주파수로 운전할 때 접촉기나 차단기에 의해 VFD를 우회하게 됩니다.
이것이 의미하는 것은:
1. 모터 기동 전류는 모터 전체 부하 전류를 초과하지 않습니다. 이는 주전원 공급 용량이 제한된 현장에서 매우 유용합니다.
2. 전반적인 모터 제어 시스템은 기동과 정지 중에만 VFD가 필요하기 때문에 더욱 안정적입니다.
3. VFD가 오작동하더라도 바이패스 스위치를 통해 모터를 기동하고 DOL을 실행할 수 있습니다. 이 경우 메인 공급 장치에 모터를 기동할 수 있는 용량이 있어야 합니다.
바이패스 스위치는 자동 또는 수동으로 제어할 수 있습니다.
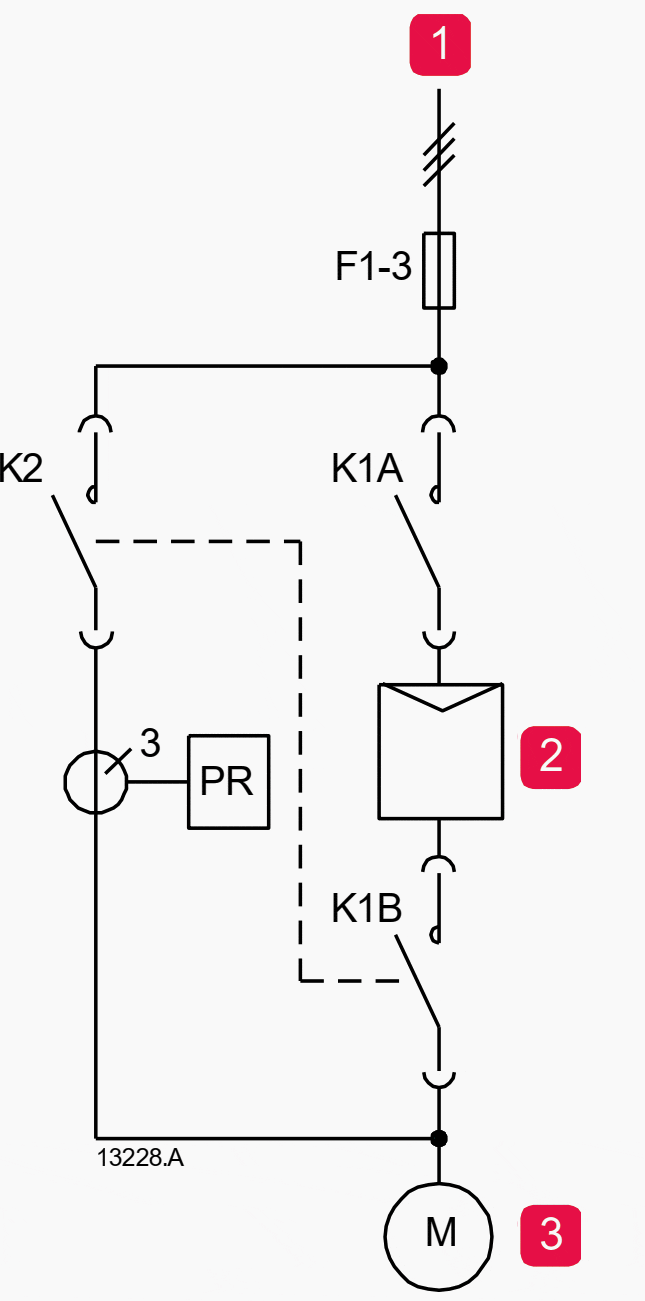
Figure 17 – Bypassed VFD installation
여기서:
1 – Three-phase supply (3상 전원 공급)
2 – VFD
3 – Motor
K1A – VFD input contactor
K1B – VFD output contactor
K2 – Bypass contactor
F1-3 – Fuses
PR – Motor protection relay
운전 시퀀스:
1. 접촉기 K1A와 K1B가 닫히고 모터가 최대 속도로 운전됩니다. VFD의 출력이 공급 주파수에 도달하면 접촉기 K1A와 K1B가 열립니다. 잠시 지연된 후 바이패스 접촉기 K2가 닫힙니다.
2. 접촉기 K1B와 K2는 전기적, 기계적으로 인터록되어 있습니다. 접촉기 K1A와 K1B를 인출하여 VFD를 전원에서 분리할 수 있습니다.
3. 모터 보호 릴레이 PR은 K2가 닫힐 때 모터를 보호합니다.
(여기서는 다루지 않았지만 VFD의 수리를 위해서 예정된 우회 운전인 경우 VFD를 수리 후 다시 VFD 운전으로 복귀할 때 현재의 모터를 정지시키지 않고 VFD로 복귀하기 위해서는 병렬운전이 필요합니다. 이 병렬운전은 VFD 출력을 모터의 속도, 위상 그리고 전압과 동일하게 조절하여 VFD 출력과 공급 전원이 동기화가 되었는지 확인 후 VFD의 접촉기들을 투입하고 그 후에 우회 접촉기를 끊게 됩니다. 이러한 동기화 병렬 운전을 위해서는 설비에 이를 위한 장비가 설치되어 있어야 합니다. 저도 한번 이런 설비를 공급한 경험이 있습니다. 다만 대부분의 경우에는 적용하지 않았는데 이 때문에 발주처와 많은 논쟁이 있었습니다. )
참고 자료
https://electrical-engineering-portal.com/start-medium-voltage-motor
Six different ways to start a medium-voltage motor you should know about | EEP
Six most common motor starting methods, their current, torque profile and installation schematics: Soft starters, variable frequency drives,
electrical-engineering-portal.com
#고압모터기동법
#단권변압기기동
#직입기동
#소프트스타터
#감압기동
#와이델타기동
#1차저항기동
#VFD기동
#VFD_By_Pass운전법
#VFD동기방법
#바이패스에서VFD로전환방법
#전동기기동법6가지기초
4
공감한 사람 보러가기댓글 0공유하기
프로필
프로필 편집
전기만33년교육·학문이웃1,477명
용인 수지에 사는 전기 ENGINEERING 전문 블로거입니다. 전기 엔지니어링과 All about Electricity를 나눕니다. . (문의 이메일: eec237@naver.com)
4
공감한 사람 보러가기댓글 0공유하기
'전기 Engineering > 전기 설비에 대한 모든 것' 카테고리의 다른 글
| 배터리 저장 장치의 전력망 통합 이유 (5) | 2024.10.16 |
|---|---|
| 비상용 발전기의 용량 계산 방법 논란 (0) | 2024.03.29 |
| HVDC 송전의 기초 (1) | 2024.02.12 |
| 개별 전동기용 역률 보상 커패시터 설치 회로 (1) | 2024.01.31 |
| Why a 10 kV INSULATION TESTER? (10kV Megger가 필요한 이유) (1) | 2024.01.07 |



